特斯拉近期集中公开五项 Optimus V3 灵巧手相关专利,直击人形机器人研发核心难点。
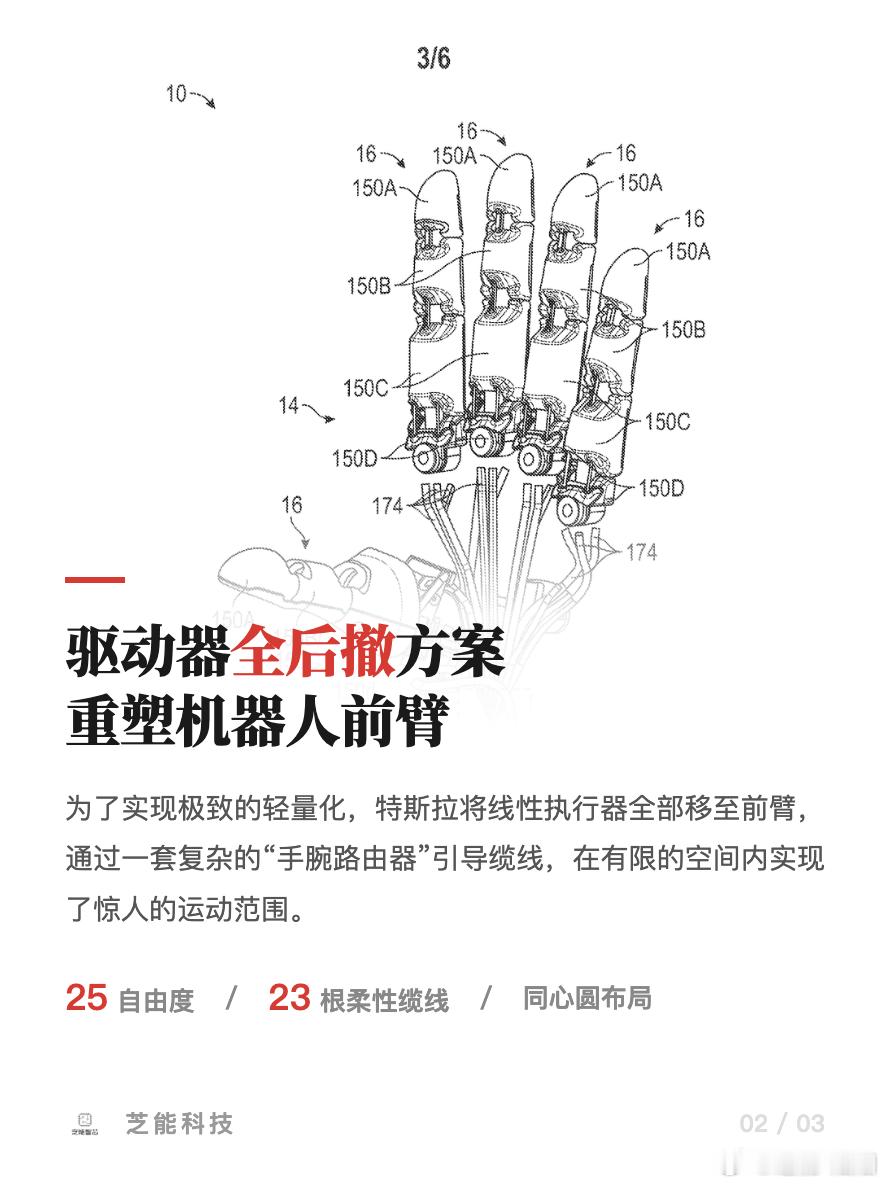
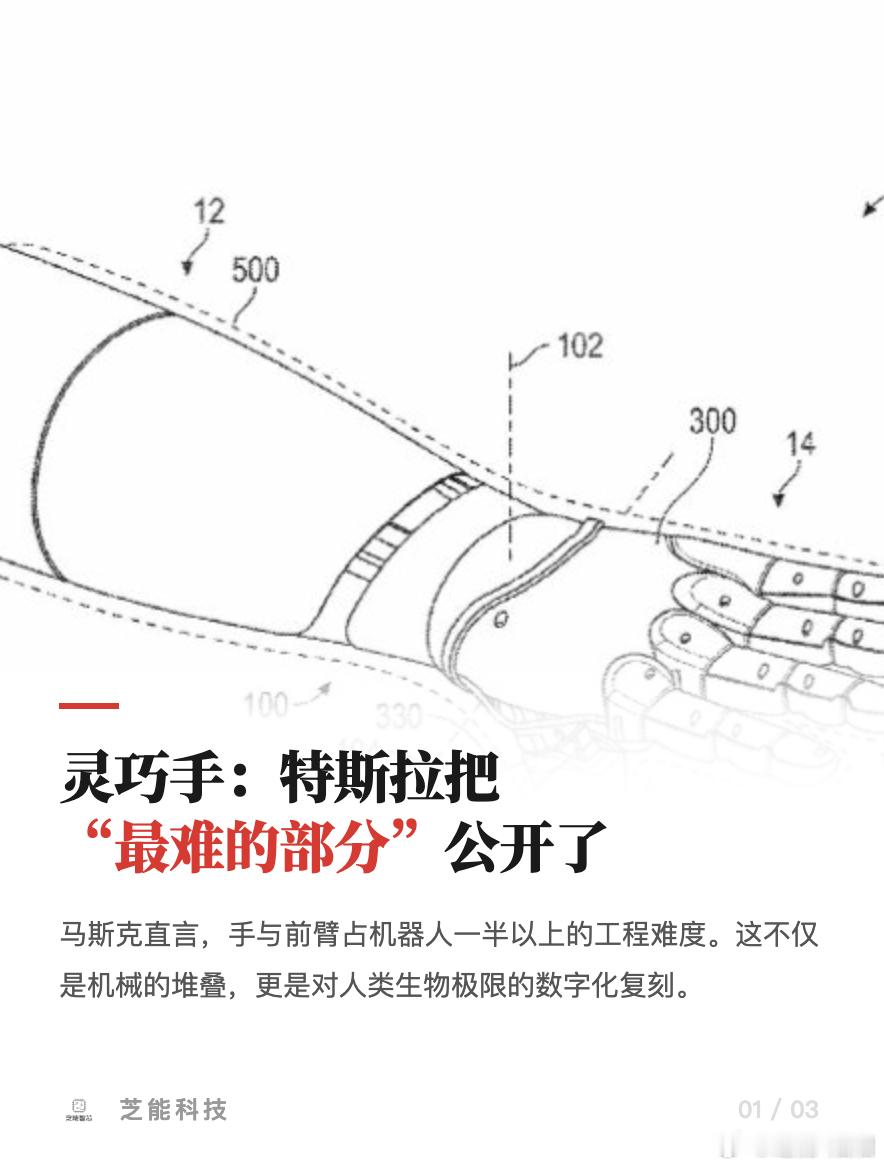
手部与前臂一直是人形机器人研发的主要瓶颈。特斯拉采用前置驱动方案,将所有执行器集成在前臂,搭配肌腱式缆线传动,大幅减轻手部自重。
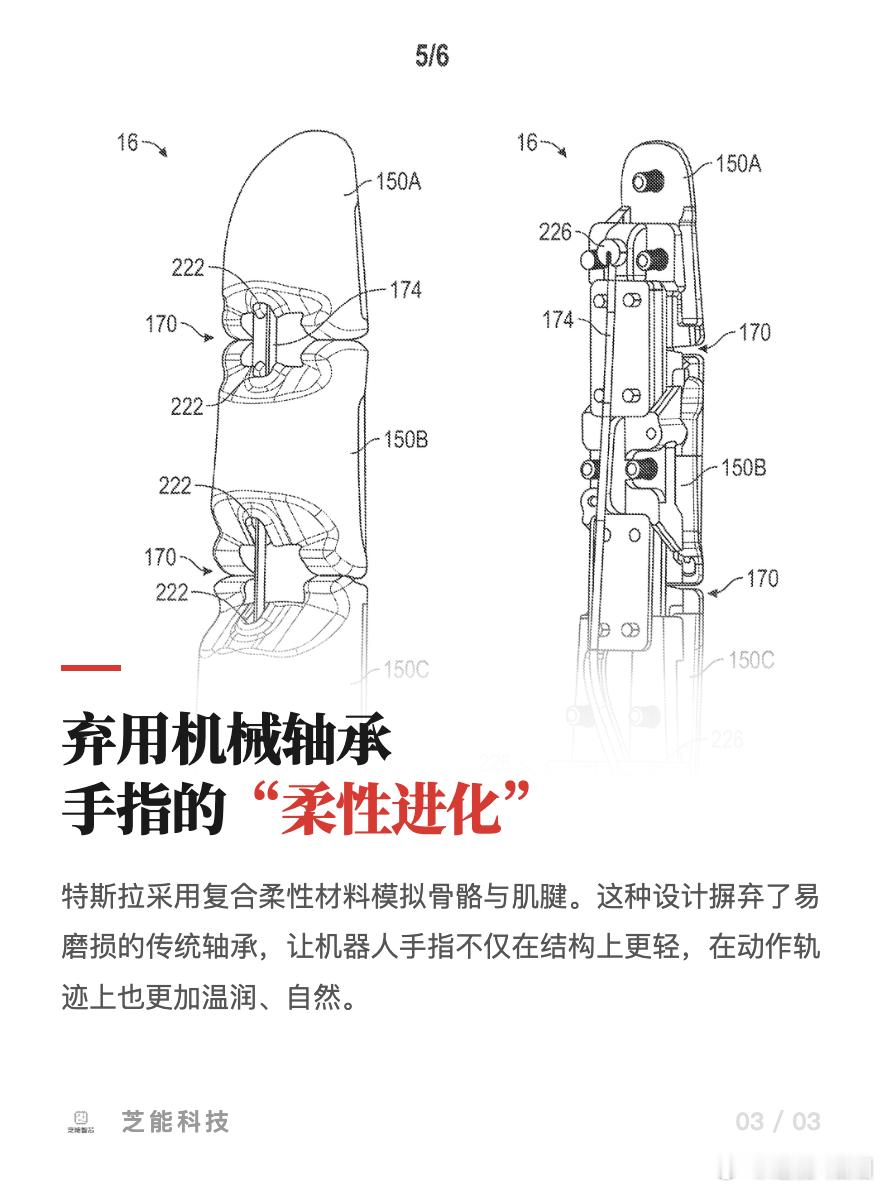
依靠特殊腕部路由结构、柔性关节设计,优化缆线走线与磨损问题,减少动作干涉与误触发。舍弃传统轴承,改用复合柔性构件,兼顾灵活度、轻量化与量产性。
这套全新机械结构 + 材料的整合设计,为人形机器人灵巧操作落地,提供了全新工程解法。
特斯拉近期集中公开五项 Optimus V3 灵巧手相关专利,直击人形机器人研发核心难点。
手部与前臂一直是人形机器人研发的主要瓶颈。特斯拉采用前置驱动方案,将所有执行器集成在前臂,搭配肌腱式缆线传动,大幅减轻手部自重。
依靠特殊腕部路由结构、柔性关节设计,优化缆线走线与磨损问题,减少动作干涉与误触发。舍弃传统轴承,改用复合柔性构件,兼顾灵活度、轻量化与量产性。
这套全新机械结构 + 材料的整合设计,为人形机器人灵巧操作落地,提供了全新工程解法。
评论列表