英文题目:Optimal Trajectory Tracking Control of Four-Wheel Independent Driving Robots With On-Axle Steering
中文题目: 四轮独立驱动同轴转向机器人的最优轨迹跟踪控制
作者:Yue Shen, Yafei Zhang, Wen-Hua Chen, Siwei He, Hui Liu, Hui Wang
作者单位: 江苏大学电气信息工程学院、英国拉夫堡大学航空与汽车工程系
期刊:IEEE Transactions on Industrial Electronics(IF 7.5新锐一区,JCR Q1)
发表时间:2025年11月21日
链接:https://ieeexplore.ieee.org/document/11087250
引文格式:Shen Y, Zhang Y, Chen W H, et al. Optimal trajectory tracking control of four-wheel independent driving robots with on-axle steering[J]. IEEE Transactions on Industrial Electronics, 2025, 72(12): 13842-13852.
01 全文速览四轮独立驱动(4WID)机器人在复杂环境下的机动性备受关注。但现有转向方案要么是差速转向(结构简单但易打滑),要么是四轮独立转向(4WIS,机动性好但需要8个电机,成本高、控制复杂)。能不能有一种兼顾两者优势的设计?
江苏大学和拉夫堡大学团队提出了一种四轮独立驱动+同轴转向(4WID-OAS)的新型机器人平台。前后轴各由一对机械耦合的轮毂电机协同控制,转向完全依靠差速实现,无需额外转向电机。图1 展示了该机器人的设计图和实物原型。
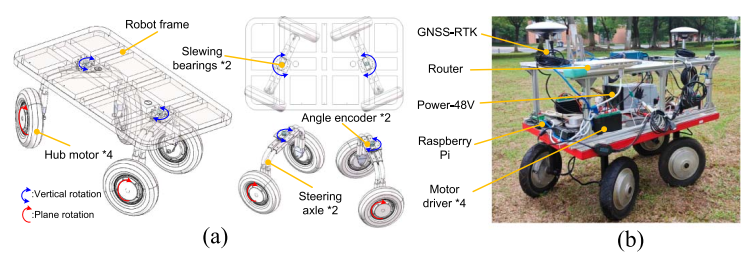
图 1 4WID-OAS机器人设计与实物
在控制方面,他们设计了一套轻量级的最优轨迹跟踪方案:将四轮速度分配策略与显式非线性模型预测控制(ENMPC)相结合。ENMPC通过泰勒展开和输出预测,推导出闭式解析解,完全避免了在线优化,从而在低成本的嵌入式平台(树莓派)上也能实时运行。
图2 展示了电子系统架构:上位机通过无线网络与树莓派通信,树莓派执行控制算法并通过RS-485驱动四个轮毂电机。
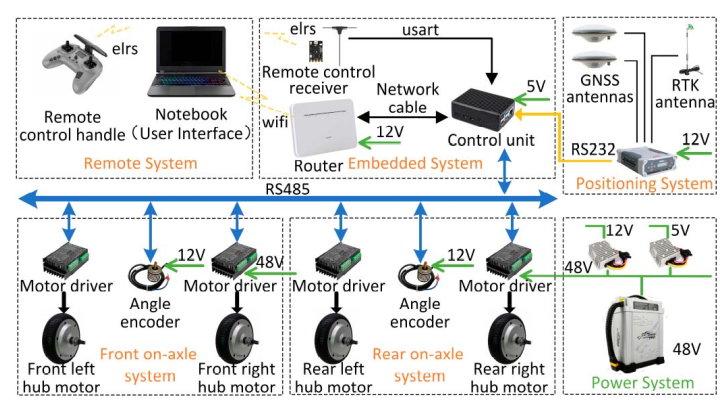
图 2 电子系统总体架构
仿真和现场实验对比了ENMPC与常规NMPC、LMPC和反步法。结果表明:ENMPC的跟踪精度与NMPC相当(IAE和MAE几乎相同),但求解时间仅为NMPC的1/10左右,非常适合算力有限的实车部署。
核心亮点:
✅新型机械设计:前后轴同轴转向,仅用四个轮毂电机实现驱动+转向,成本低、扭矩需求小
✅显式MPC闭式解:通过动态扩展和泰勒展开推导出解析控制律,无需在线优化
✅计算效率极高:在树莓派上实测求解时间远低于常规MPC
✅稳定性有保证:闭环误差系统退化为二阶线性微分方程,极点可配置
✅实车验证充分:S弯和8字弯场景下,ENMPC与NMPC精度相当,且控制信号平滑
02研究内容
🚗2.1 4WID-OAS机器人的运动学建模
该机器人的独特之处在于:前后轴各通过回转支承与车架连接,每个轴的转向角由两侧轮毂电机的差速控制。图3 展示了机器人的运动学模型,定义了瞬时转动中心(ICR)以及前后轴转向角

图 3 4WID-OAS机器人运动学模型
根据纯滚动约束,前后轴的速度和转向角满足:
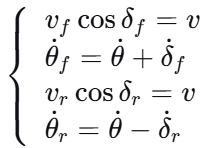
由此推导出四轮速度分配策略:
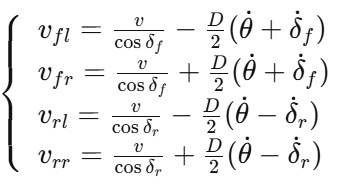
其中D为轮距。通过设定不同的目标转向角,可实现四种机动模式:前轴转向、后轴转向、平行转向、协调转向。本文重点研究协调转向
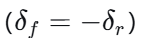
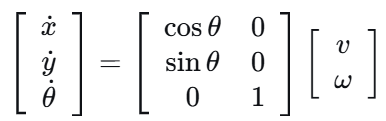
图4 展示了四种机动模式的示意图。
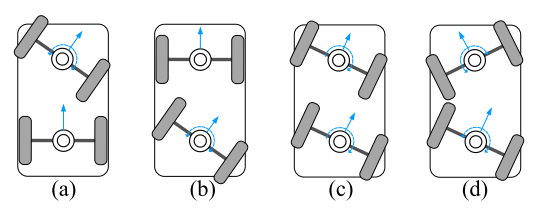
图 4 4WID-OAS机器人的四种机动模式
🎮2.2显式非线性模型预测控制(ENMPC)设计
传统NMPC需要在每个采样时刻在线求解非线性优化问题,计算负担重。本文的ENMPC通过输出预测的泰勒展开和控制序列的参数化,得到了闭式最优解。
Step 1:动态扩展求相对阶
系统输出为








矩阵

Step 2:预测输出与参考的泰勒展开
在预测时域


Step 3:闭式最优解
令J对控制序列的导数为零,并提取第一个控制量(即


其中


只要多项式
Step 4:四轮速度指令
将



📊2.3仿真与实验验证
仿真采用S形和8字形参考轨迹,速度0.6 m/s,对比了ENMPC、常规NMPC、LMPC和反步法。
图5 展示了S形轨迹的跟踪结果。反步法在弯道处偏差明显;NMPC精度最高;ENMPC与LMPC性能接近。图6 为四轮速度指令,反步法输出振荡剧烈,而三种预测控制均输出平滑。
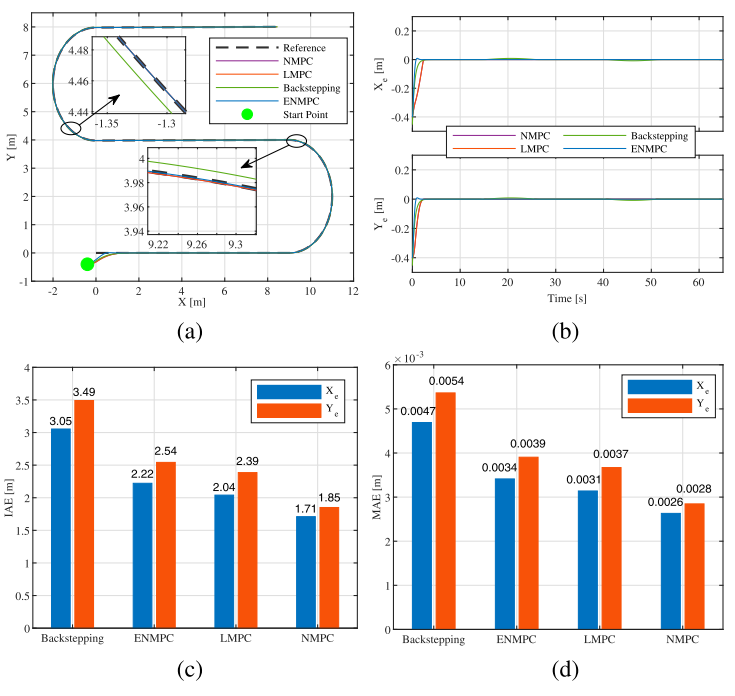
图 5 S形轨迹跟踪仿真结果
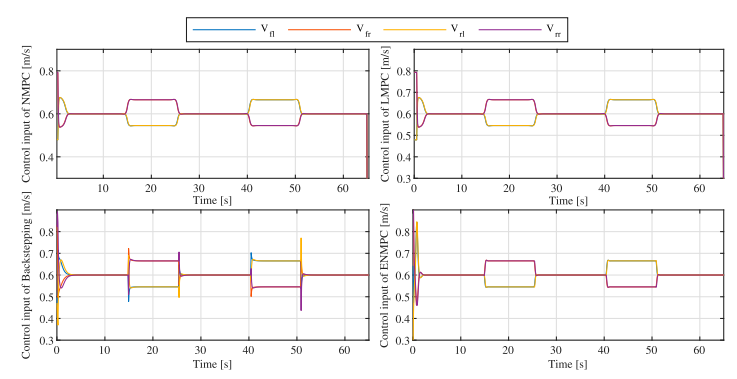
图 6 S形轨迹下的四轮速度指令
图7 对比了不同转向系统的转向扭矩。4WID-OAS和差速转向的扭矩远小于阿克曼和4WIS,这是因为后者需要克服侧向轮胎力,而前者通过轮速差产生横摆力矩,轮胎接近纯滚动。
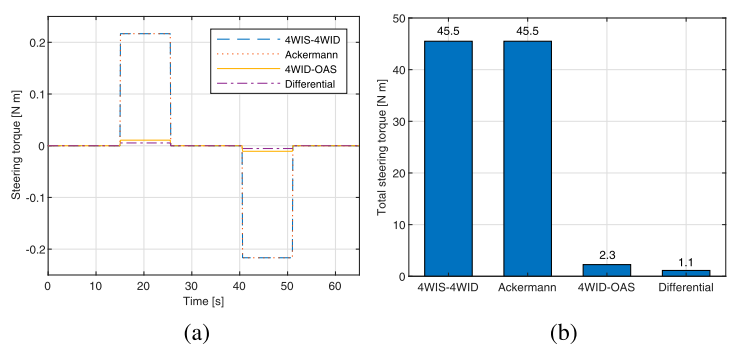
图 7 不同转向系统的转向扭矩对比
图8-9 为8字形轨迹的仿真结果,趋势一致:ENMPC精度接近NMPC,控制信号平滑,且扭矩优势保持。
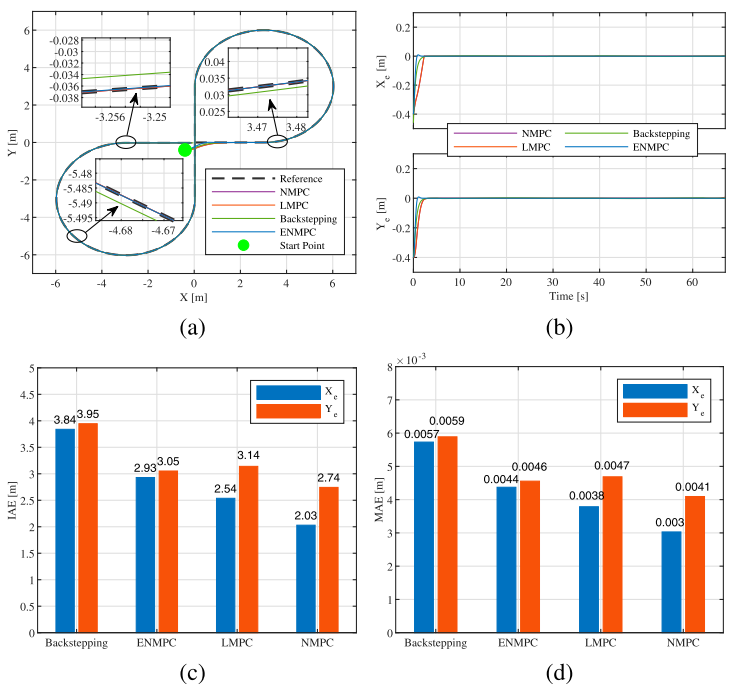
图 8 8字形轨迹跟踪仿真结果
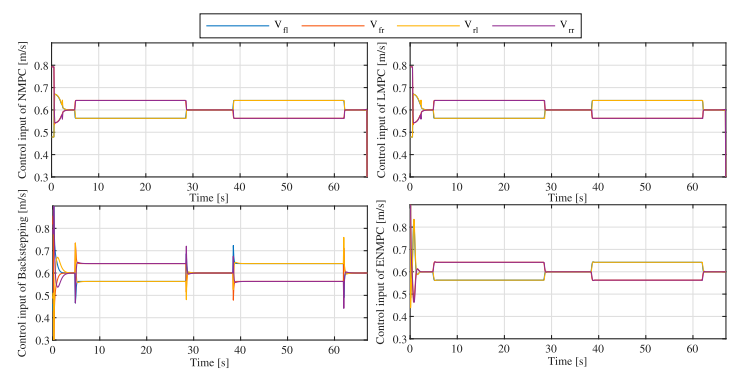
图 9 8字形轨迹下的四轮速度指令
现场实验在真实机器人上进行,GNSS-RTK定位精度优于1.5 cm。图10展示了S形轨迹的实车跟踪结果。定量指标显示:ENMPC的IAE(X: 27.63, Y: 26.91)与NMPC(X: 27.60, Y: 26.91)几乎相同,但求解时间仅0.011秒,而NMPC需要0.103秒——快了近10倍。
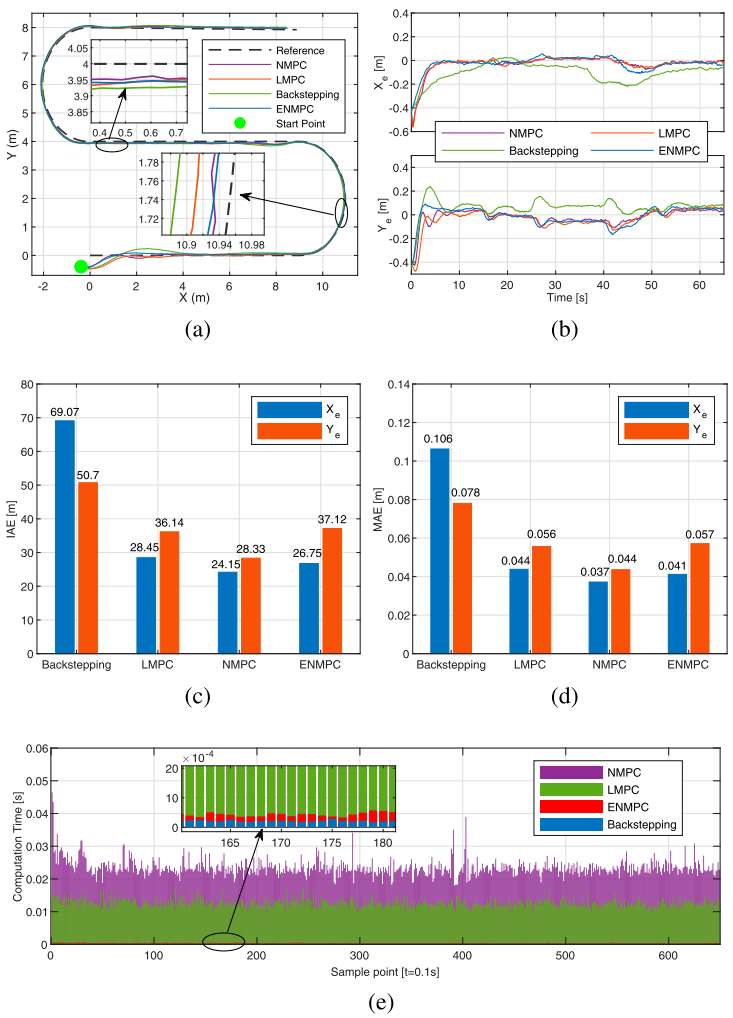
图 10 S形轨迹实车实验结果
图11为实车四轮速度指令,ENMPC依然保持平滑。
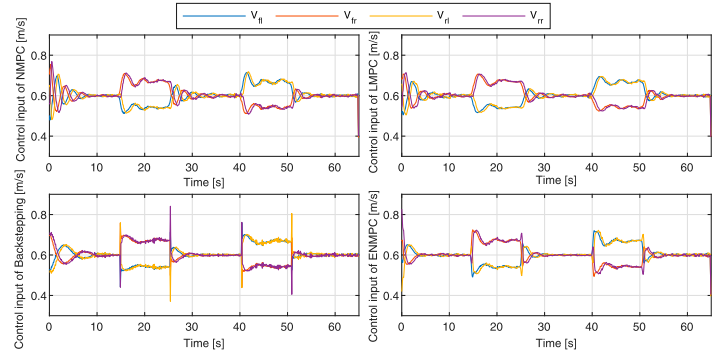
图 11 S形轨迹实车速度指令
图12为8字形实车结果,ENMPC的IAE为38.88(X)和33.19(Y),与NMPC相差无几,求解时间同样大幅领先。
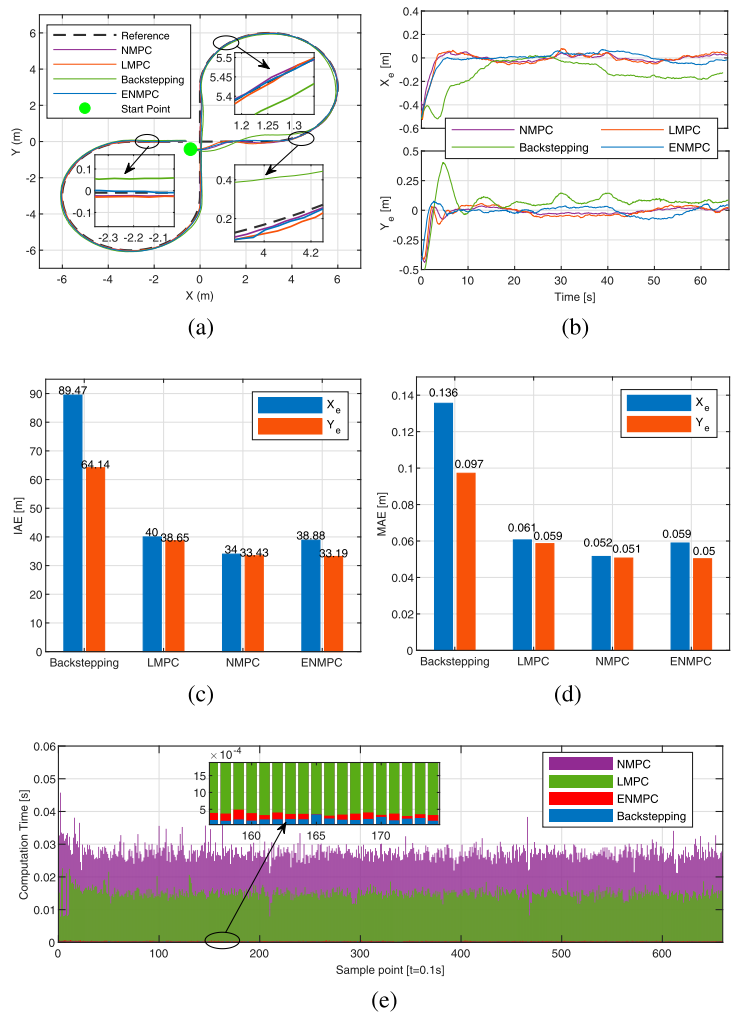
图 12 8字形轨迹实车实验结果
图13分析了控制阶数r的影响。增大r可略微提升精度,但误差离散度也增大(超调更明显),实际中需折中选取。
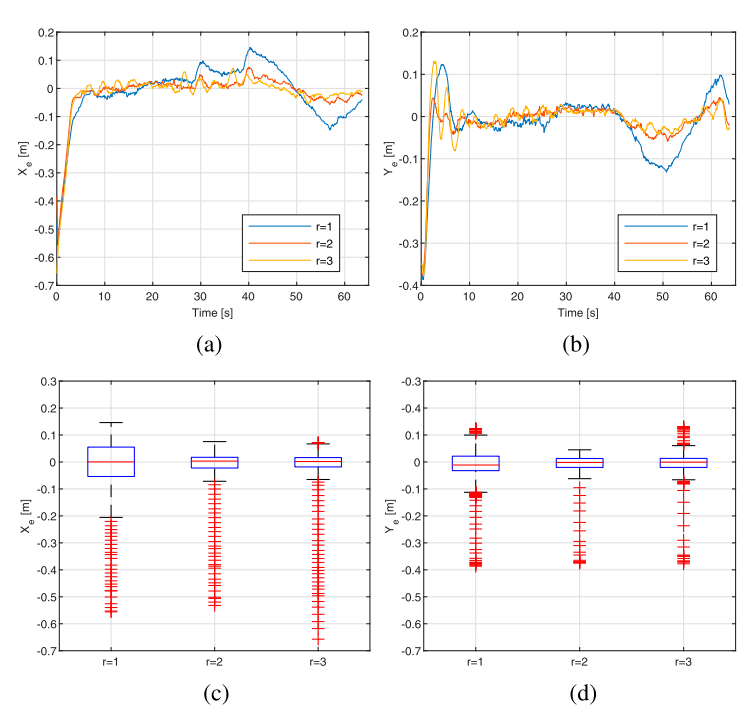
图 13 不同控制阶数下的跟踪误差对比
03 创新点①新型同轴转向机械设计
4WID-OAS机器人前后轴各由一对轮毂电机通过差速实现转向,无需额外转向电机。相比4WIS(8个电机),硬件成本大幅降低;相比传统差速转向,轮胎滑移更小,机动性更好。图7的扭矩对比表明,其转向扭矩远低于阿克曼和4WIS。
②ENMPC闭式解,无需在线优化
传统NMPC需要在每个控制周期求解非线性规划,计算量大。本文通过动态扩展、泰勒展开和解析求导,推导出显式控制律(23),控制增益可离线预计算,在线仅需简单的代数运算。这使得在树莓派等低成本嵌入式平台上也能实现高性能预测控制。
③严格的稳定性证明
闭环误差系统化简为(26)所示的二阶线性微分方程。只要极点配置在左半平面,跟踪误差渐近收敛到零。这一结论简洁而有力。
④实车验证充分,计算效率优势明显
在S形和8字形两种典型轨迹下,ENMPC的跟踪精度(IAE/MAE)与NMPC几乎相同,但求解时间仅为NMPC的10%左右。反步法虽然计算更快,但精度差且控制信号振荡严重。
⑤控制阶数与预测时域可调
通过调整控制阶数 (r) 和预测时域 (T),可以在精度、平滑度和计算负担之间灵活折中。图16表明,(r=2) 已能获得很好的性能,(r=3) 提升有限但超调增大。
04 总结与展望这篇文章最大的亮点在于从工程需求出发设计机械结构,再为这个结构定制控制算法。4WID-OAS机器人用最少的执行器实现了驱动和转向的双重功能,机械设计本身就有创新。而ENMPC则解决了“如何在有限算力下实现非线性预测控制”这个实际问题——不是靠简化模型,而是靠数学推导出闭式解。
从实车数据看,ENMPC在精度不输NMPC的前提下,计算效率提升了近一个数量级。这意味着同样的硬件可以跑更高的控制带宽,或者同样的控制任务可以用更便宜的硬件完成。对于农业机器人、服务机器人等成本敏感的应用场景,这个优势很实在。
不过,当前工作主要聚焦于协调转向模式((delta_f = -delta_r)),其他三种机动模式(前轴转向、后轴转向、平行转向)的控制策略尚未展开。此外,控制器依赖GNSS-RTK定位,在信号遮挡环境下如何保持性能也是后续需要考虑的问题。
未来研究将聚焦于以下几个方向:
🔸多模式控制策略:针对前轴转向、后轴转向、平行转向三种模式,分别设计相应的轨迹跟踪控制器,使机器人能根据不同任务自动切换模式。
🔸鲁棒性与扰动抑制:当前模型假设纯滚动、无滑移。实际地面可能松软或湿滑,需要引入滑移补偿或鲁棒项。
🔸传感器融合与拒止环境导航:在GNSS信号弱或失效的场景下(如仓库、果园冠层下),融合激光雷达、惯性导航或视觉里程计,保持跟踪精度。
🔸能量最优控制:4WID-OAS的差速转向虽然扭矩小,但轮速差会导致额外能耗。未来可在性能指标中引入能耗项,在跟踪精度和能耗之间进行多目标优化。
🔸集群协同与编队控制:将单机ENMPC扩展到多机器人系统,实现协同搬运、编队巡逻等功能。
从“笨重昂贵”到“轻巧高效”,4WID-OAS+ENMPC这套组合拳,为轮式移动机器人的自主作业提供了一个低成本、高精度的新思路。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。