英文题目:Hamiltonian based AUV navigation using adaptive finite-time trajectory tracking control
中文题目: 基于Hamiltonian的自适应有限时间AUV轨迹跟踪控制
作者:Jiankuo Cui, Mengxue Hou, Zheng Peng, Ying Wang, Jun-Hong Cui
作者单位: 吉林大学、圣母大学、电子科技大学(深圳)高等研究院、深圳海洋信息技术产业研究院、智海科技
期刊:Ocean Engineering(IF 5.5新锐二区,JCR Q1)
发表时间:2025年1月15日
链接:https://doi.org/10.1016/j.oceaneng.2025.120329
引文格式:Cui J, Hou M, Peng Z, et al. Hamiltonian based AUV navigation using adaptive finite-time trajectory tracking control[J]. Ocean Engineering, 2025, 320: 120329.
01 全文速览自主水下机器人(AUV)在海洋环境监测、管道巡检、水下对接等任务中,轨迹跟踪精度直接决定任务成败。但海洋环境复杂——海流干扰时变、模型参数不确定、系统强非线性——这些因素让AUV的精确控制变得相当棘手。
现有的控制方法大多基于线性化或简化模型,收敛速度慢、鲁棒性不足。更关键的是,大部分研究停留在无限时间控制,系统响应不够快。
吉林大学等团队提出了一套基于Hamiltonian方法的自适应有限时间轨迹跟踪控制方案。他们用正交分解技术将6-DOF AUV模型转化为端口受控Hamiltonian模型,然后结合Hamiltonian控制理论和有限时间Lyapunov稳定性理论,设计出有限时间轨迹跟踪控制器。进一步,考虑模型参数摄动,又设计了自适应版本。
图1 展示了AUV的空间坐标系:大地坐标系(E)和载体坐标系(O),6个自由度包括三轴位置(x,y,z)和三轴姿态(φ,θ,ψ)。
图 1 AUV六自由度空间坐标系
图2 展示了AUV轨迹跟踪的场景:AUV需要跟踪预设的期望轨迹,同时抵御海流干扰和参数不确定性的影响。
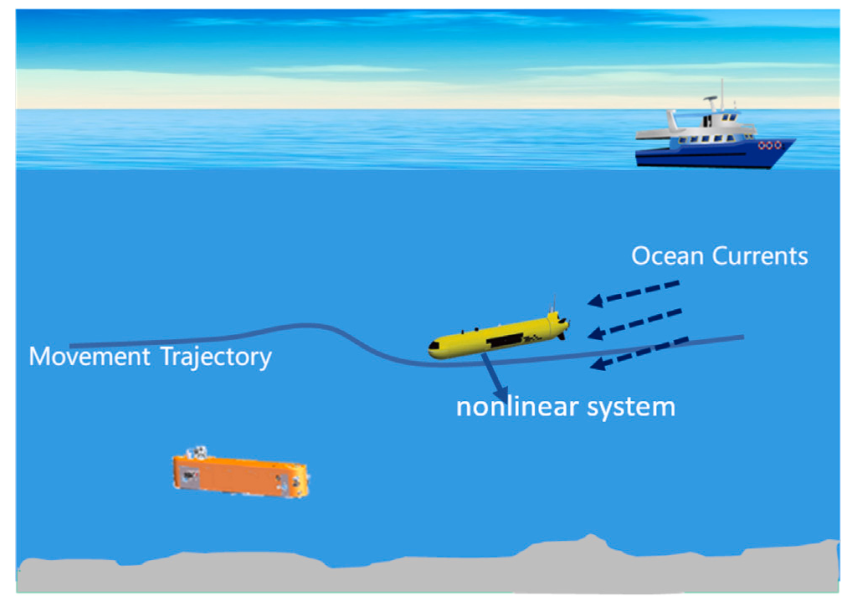
图 2 AUV轨迹跟踪场景示意图
仿真实验在螺旋线和梳状线两种轨迹下进行,对比了自适应有限时间控制器(AFSTTTC)、有限时间控制器(FTSTTC)和传统PCH控制器(PCHTTC)。结果表明:AFSTTTC在6秒内将跟踪误差收敛到0.001米量级,而PCHTTC需要30秒以上,且稳态误差仅0.1米。
核心亮点:
✅ 有限时间收敛:收敛时间有上界,且可通过参数调节
✅ Hamiltonian框架:从能量角度处理非线性,无需线性化近似
✅ 自适应能力:可应对模型参数30%的摄动
✅ 抗扰动强:同时抵御慢变海流和突变强干扰
✅ 6-DOF全驱动:不局限于简化模型,直接处理完整动力学
02 研究内容🎯2.1问题描述:6-DOF AUV模型与挑战
AUV的运动由6-DOF动力学方程描述:

其中







三个核心挑战:
1.强非线性:科里奥利项、阻尼项都是速度的函数
2.时变扰动:海流缓慢变化,还可能突然增强
3.参数不确定性:实际作业中模型参数存在偏差(本文假设30%误差)
🔧2.2 Hamiltonian方法:从能量角度看控制
Hamiltonian控制理论的核心是把系统写成如下形式:

其中



图3 展示了本文控制器的整体框图。可以看到,控制回路中包含了有限时间控制器、自适应律和扰动补偿模块。
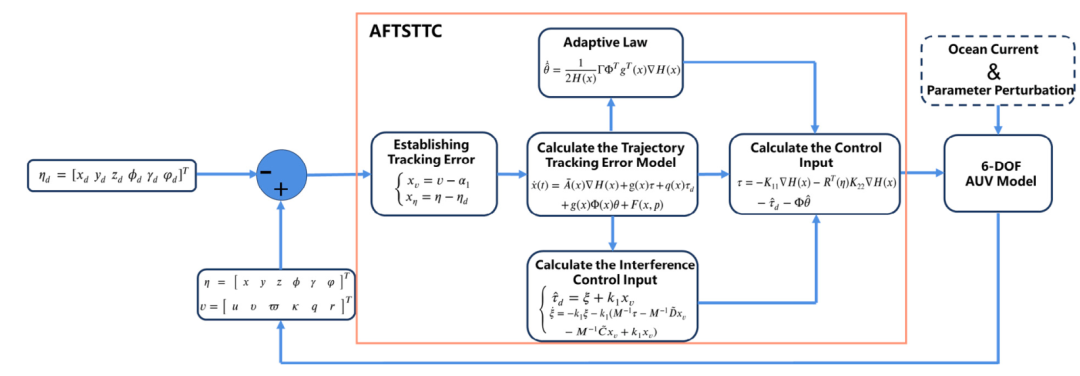
图 3 自适应有限时间轨迹跟踪控制器框图
Lemma 4 给出了非线性系统的Hamiltonian实现方法:对于一个给定的正定函数H(x),系统的向量场可以正交分解为保守部分和耗散部分,从而写成PCH形式。
关键参数设定:论文采用ODIN型AUV,球体直径约0.63m,质量125kg,最大航速3m/s,具体参数见附录。
🎮2.3控制器设计:从有限时间到自适应
第一步:建立轨迹跟踪误差模型
定义位置误差



其中


第二步:有限时间轨迹跟踪控制器(FTSTTC)
设计控制律如下:

其中

第三步:自适应有限时间轨迹跟踪控制器(AFSTTTC)
考虑模型参数摄动

控制律扩展为:

证明了闭环系统的自适应有限时间稳定性。
图3 中黄色高亮的部分就是自适应律模块,它根据系统状态在线更新参数估计。
📊2.4仿真实验:螺旋线与梳状线
仿真设置两个轨迹场景:
Case 1:螺旋线

Case 2:梳状线(分段规划,表2)。两种轨迹分别对应AUV的精细化搜索和广域覆盖任务。
三种控制器对比:
AFSTTTC:本文自适应有限时间控制器
FTSTTC:本文非自适应有限时间控制器
PCHTTC:传统PCH无限时间控制器(Cui et al., 2021)
三个仿真场景设置:
Scenario 1:参数摄动30% + 慢变扰动 + 突变扰动(30-40s)
Scenario 2:参数摄动30% + 慢变扰动(无突变)
Scenario 3:仅有慢变扰动(无参数摄动)
图4和5展示了螺旋线轨迹的三维跟踪结果。即使AUV起点与期望轨迹存在较大偏差,AFSTTTC仍能快速收敛,实际轨迹与期望轨迹几乎重合,稳态误差小于0.001米。
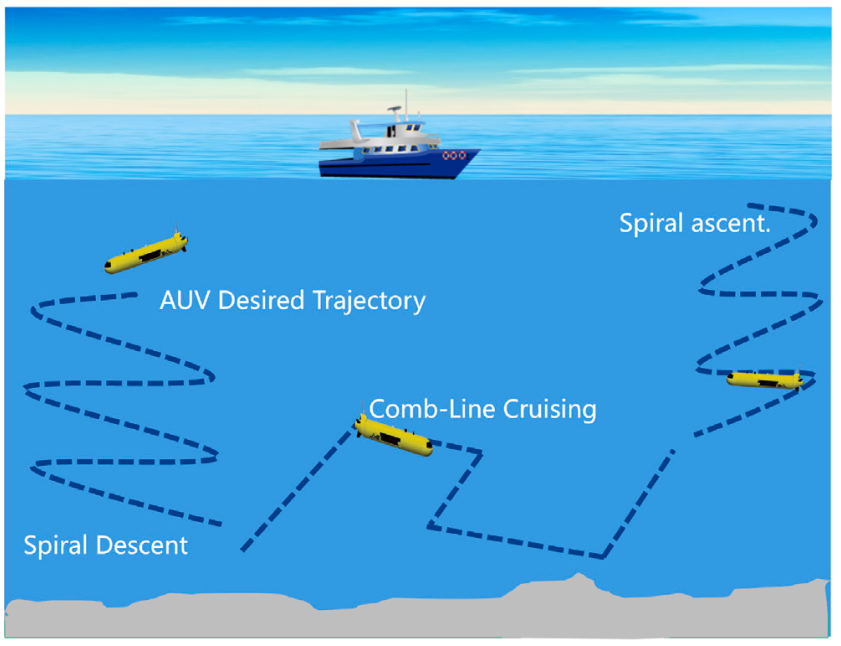
图 4 螺旋线三维轨迹跟踪结果
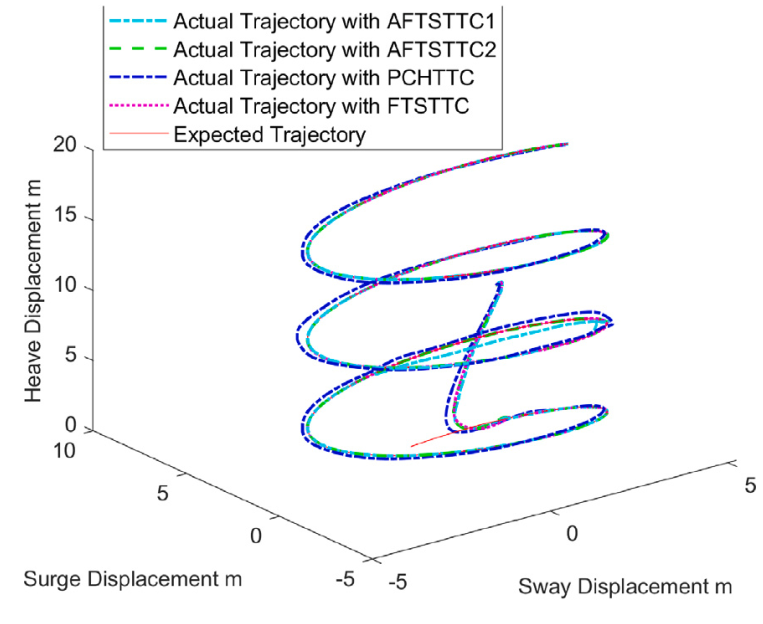
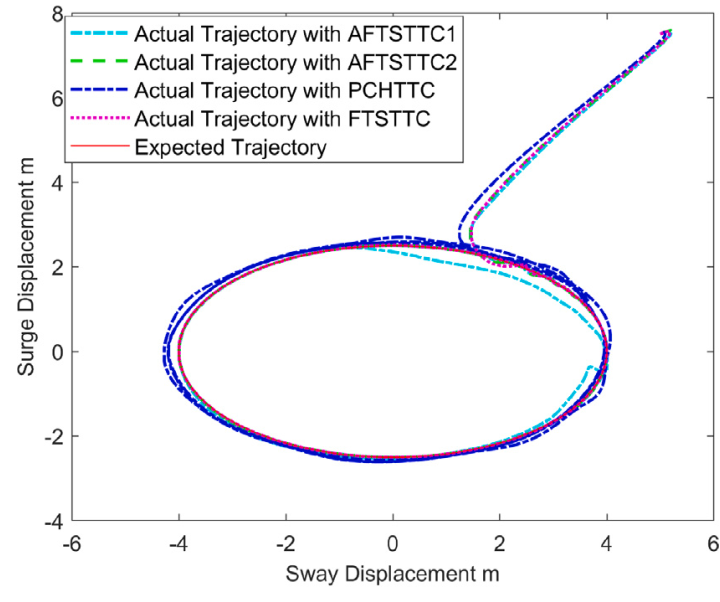
图 5 螺旋线轨迹投影对比
图6对比了三个场景下的位置跟踪误差(以纵荡、横荡、垂荡为例)。关键数据:
AFSTTTC(Scenario 1):收敛时间约6s,突变扰动后最大超调0.98m,稳态误差10⁻³m
FTSTTC(Scenario 3):收敛时间4.5s,超调0.35m,稳态误差10⁻³m
PCHTTC(Scenario 3):收敛时间8s,超调0.45m,稳态误差10⁻¹m
当参数摄动30%时,PCHTTC的性能明显下降,而AFSTTTC和FTSTTC基本不受影响。
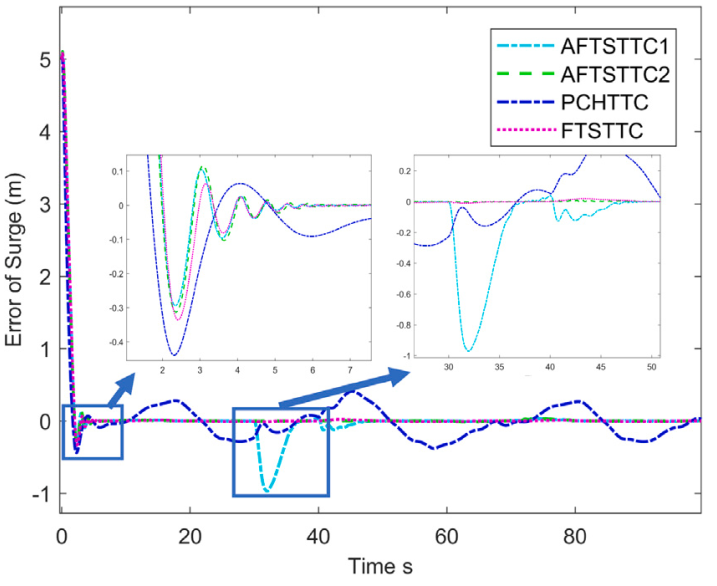
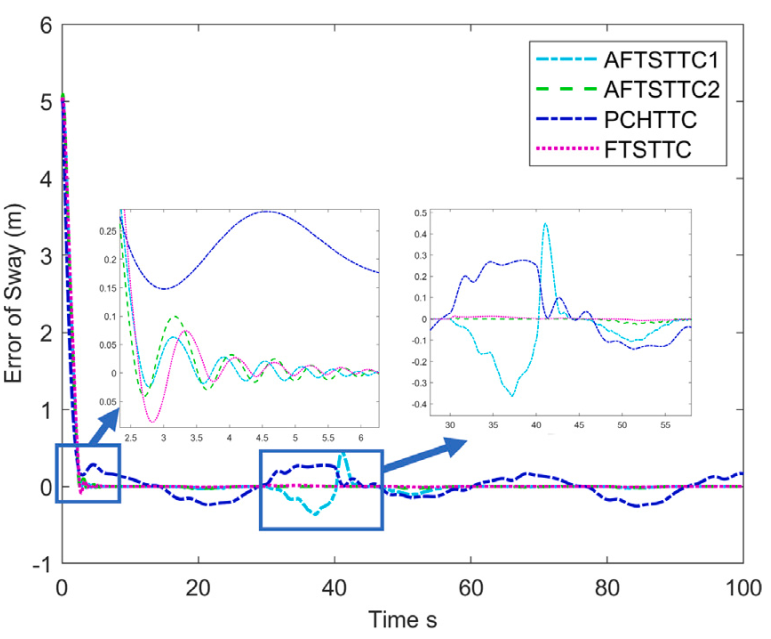
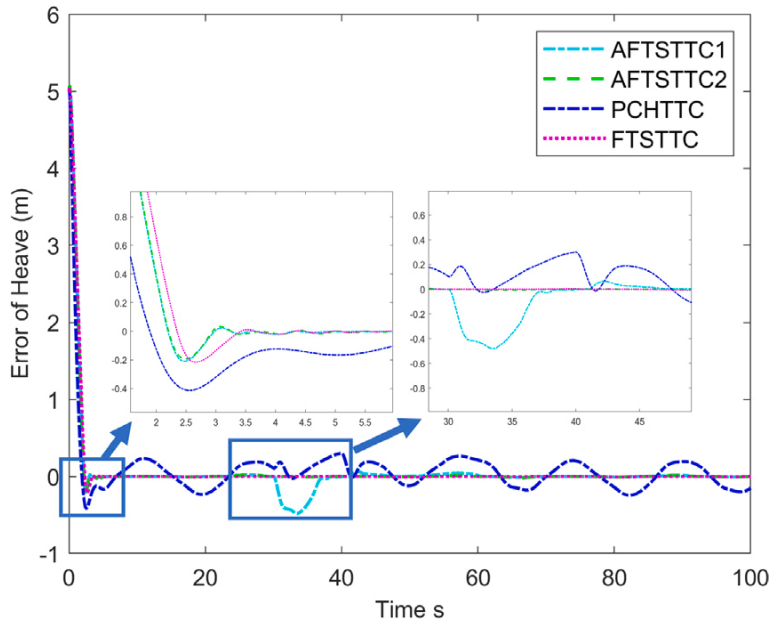
图 6 纵荡、横荡、垂荡跟踪误差对比
图7展示了姿态角(横摇、纵摇、艏摇)的跟踪误差。PCHTTC在参数摄动下表现不佳,而AFSTTTC始终保持10⁻³ rad的稳态精度。
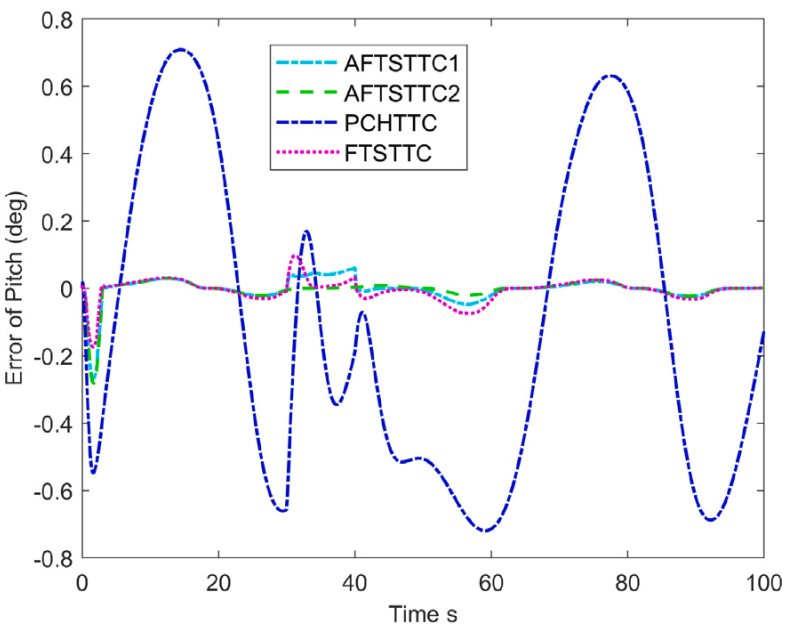
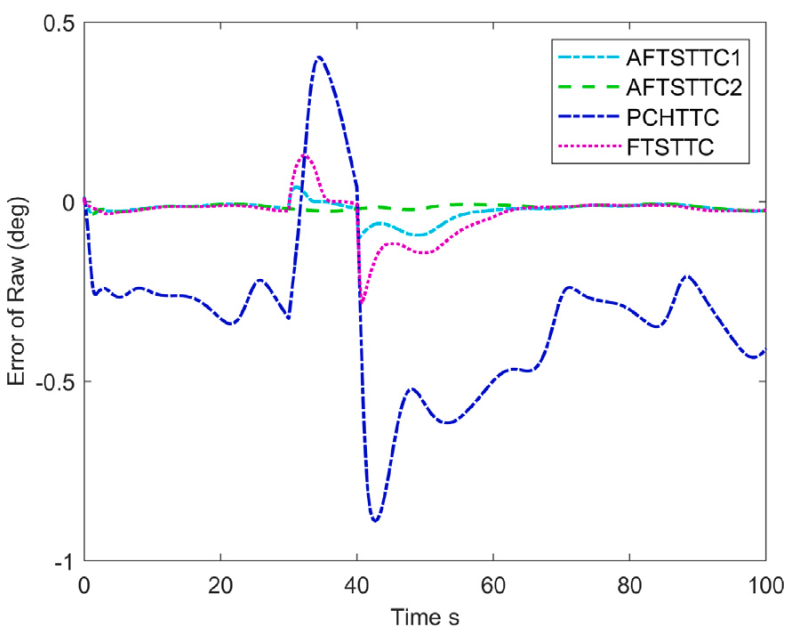
图 7 姿态角跟踪误差对比
图8展示了速度误差。AFSTTTC控制下速度变化平稳,而PCHTTC存在明显振荡,说明AFSTTTC的过渡过程更加平滑。
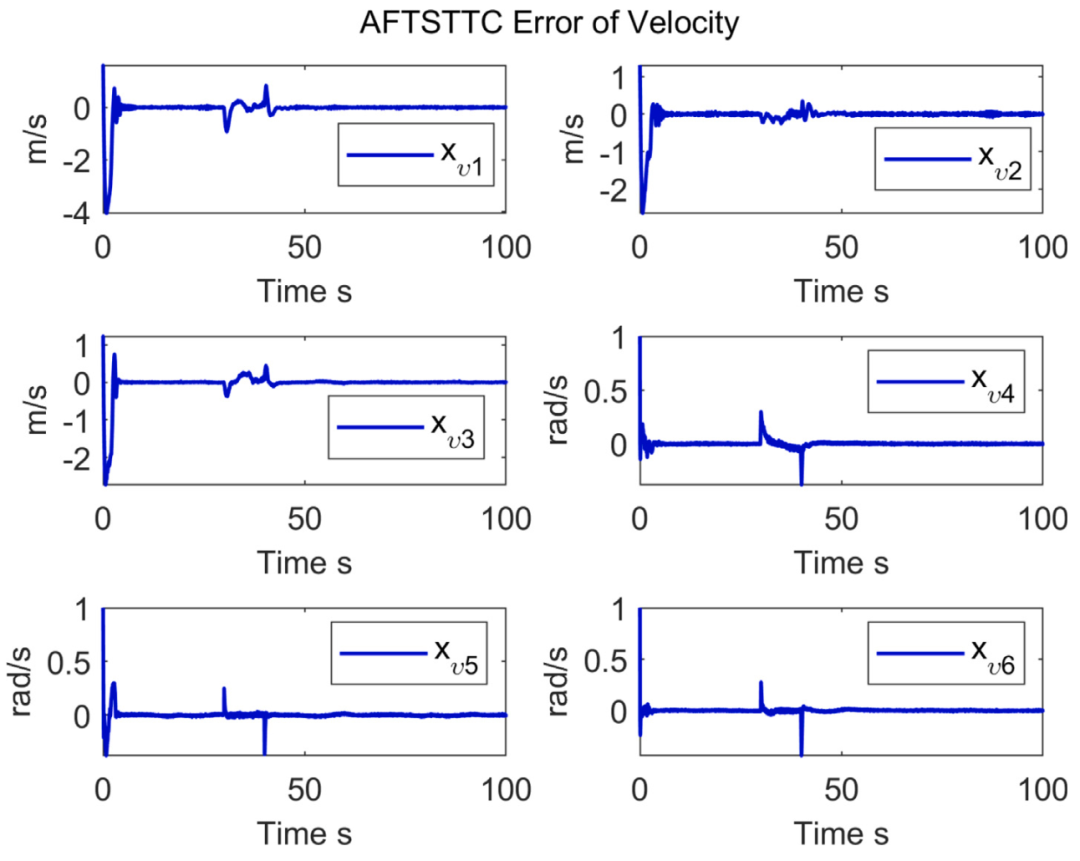
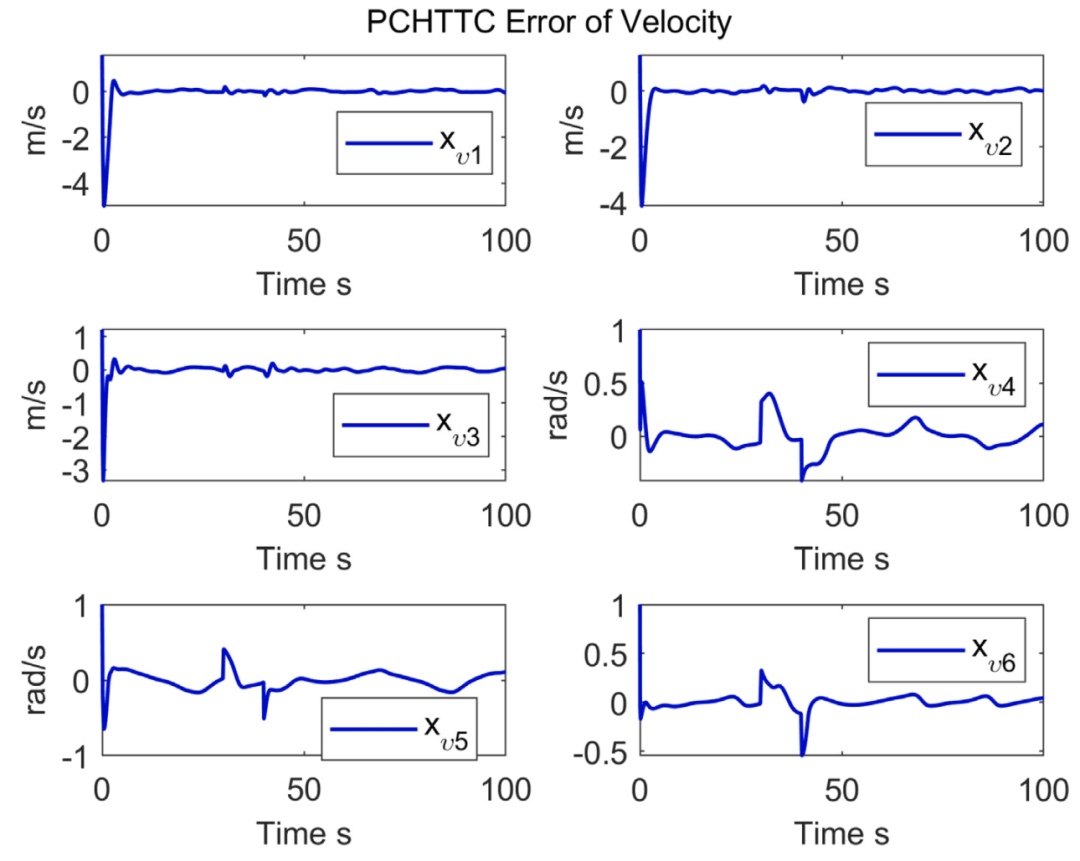
图 8 速度误差对比
图9-10展示了梳状线轨迹的完整跟踪结果。趋势与螺旋线一致:AFSTTTC收敛最快、精度最高、轨迹最平滑。

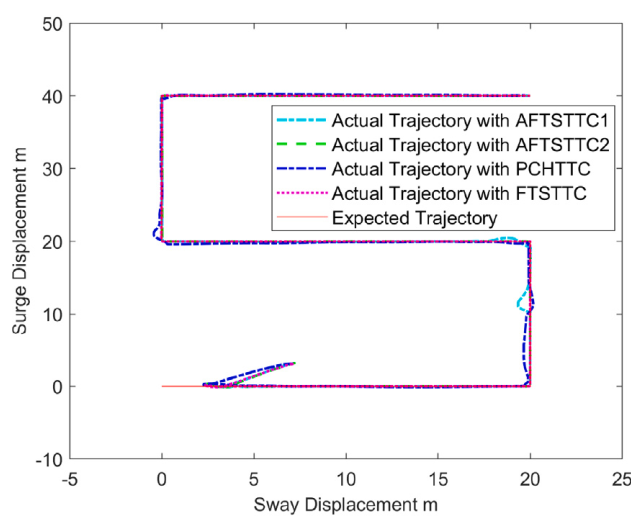
图 9 梳状线三维轨迹跟踪结果
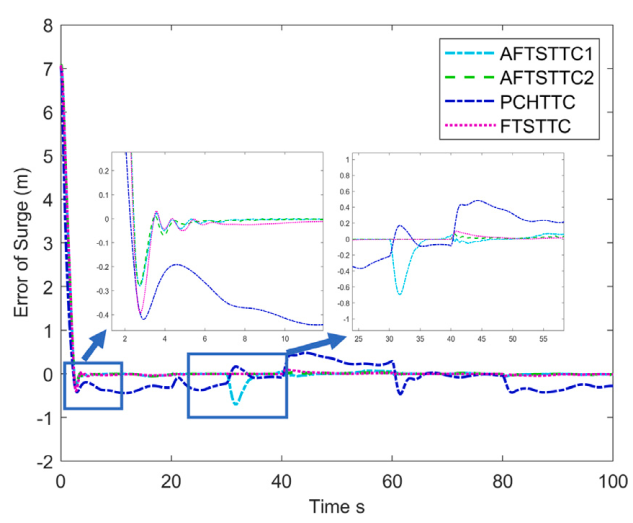
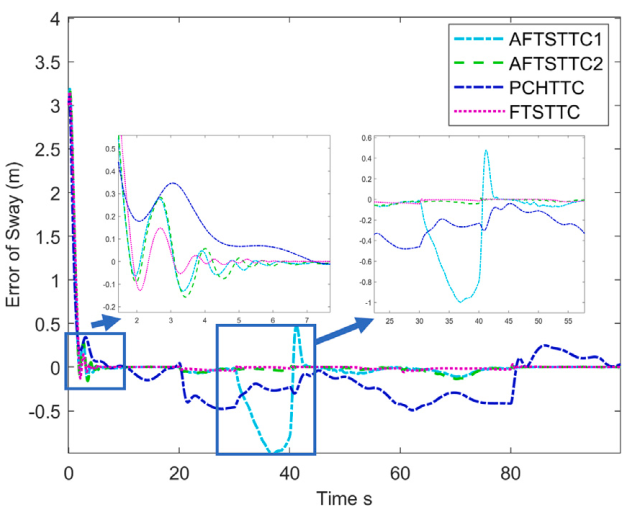
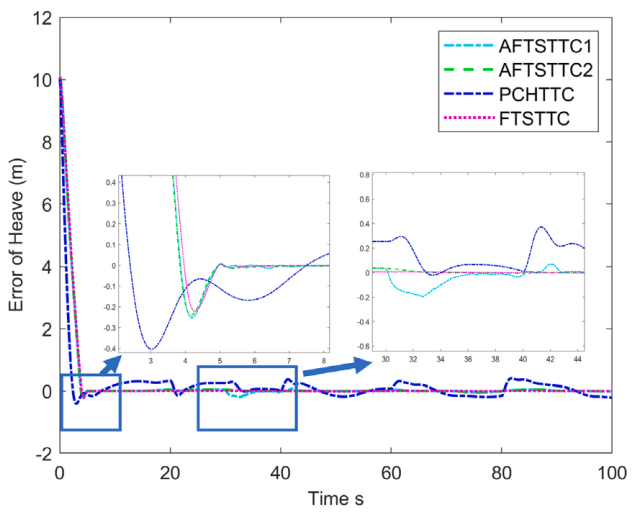
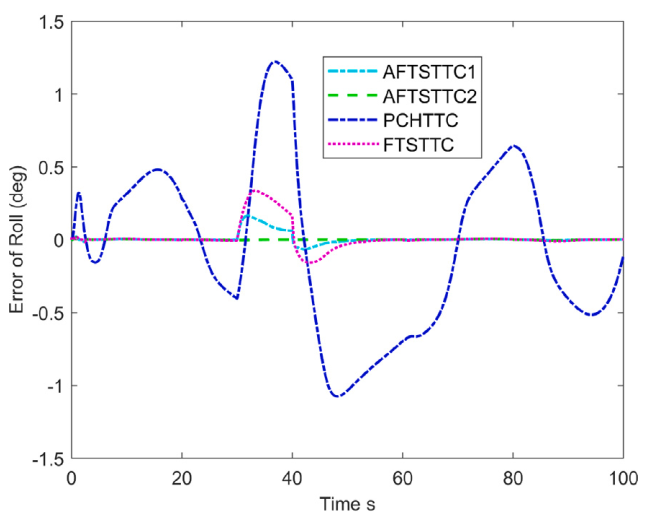
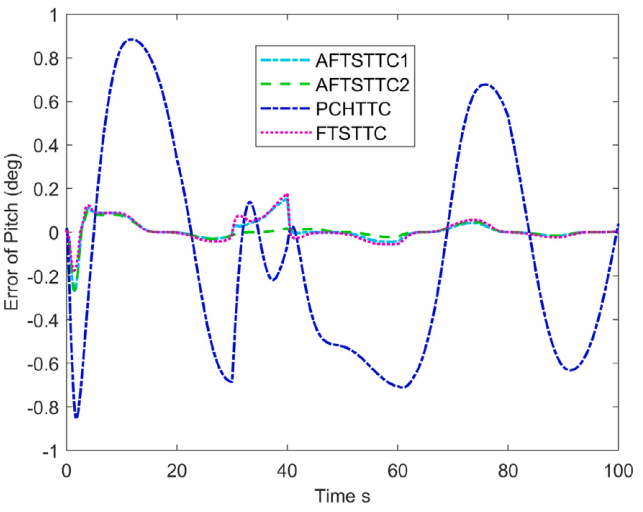
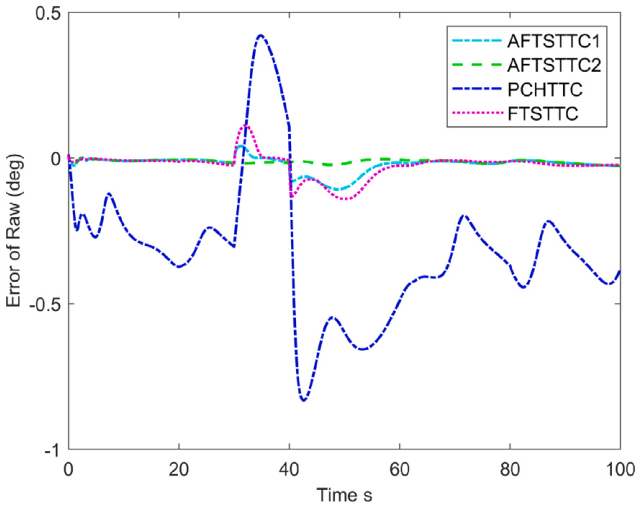
图 10 梳状线位置误差与姿态误差
图11展示了两种控制器下的速度响应。AFSTTTC的各自由度速度变化高度一致,说明系统能维持稳定的运动姿态。
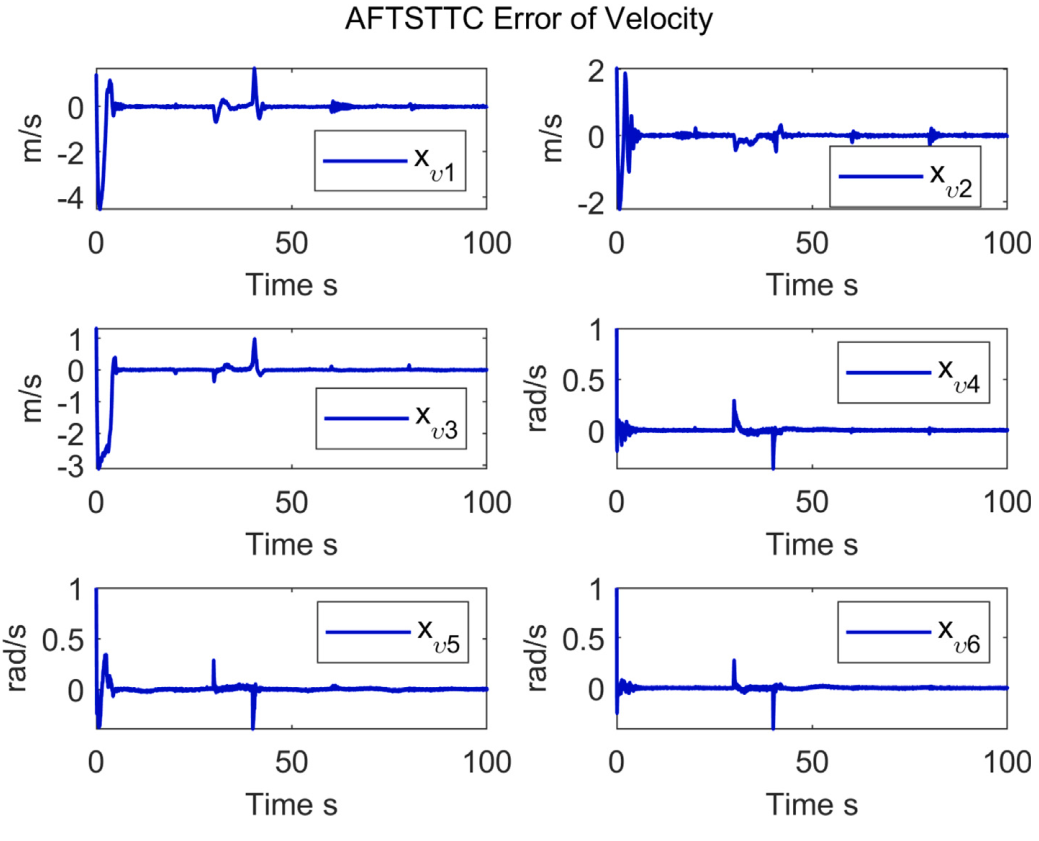
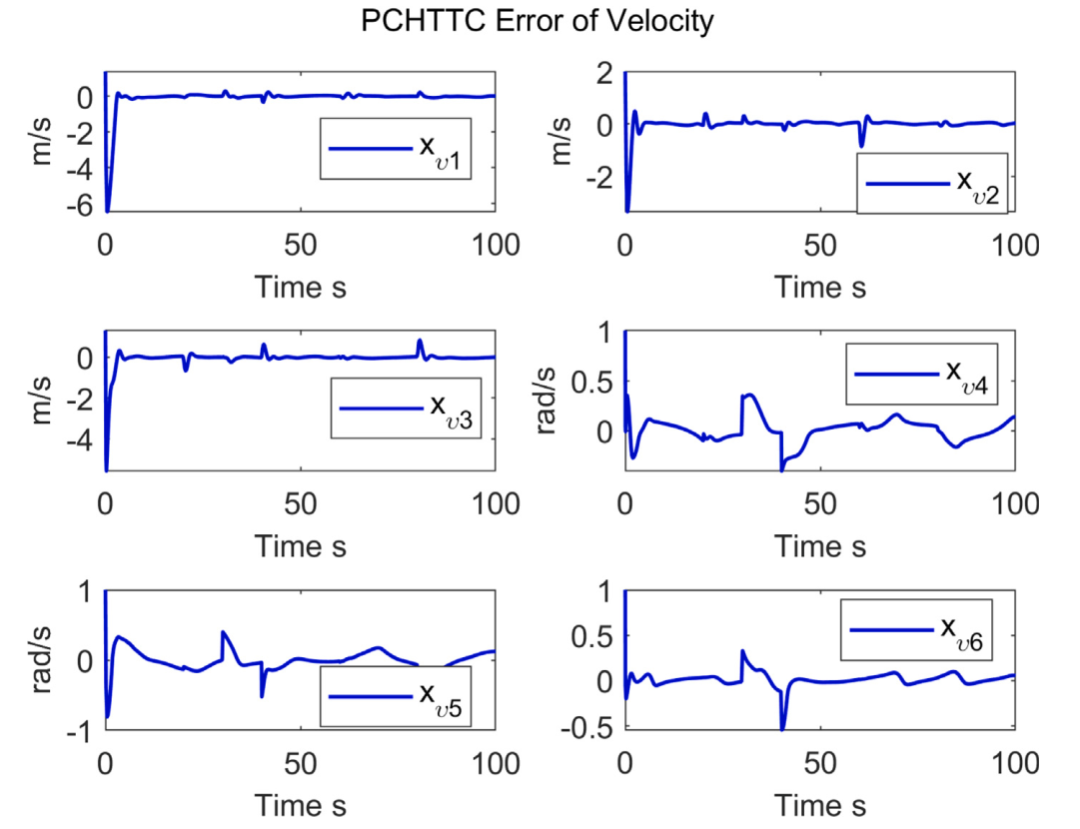
图 11 AFSTTTC与PCHTTC速度响应对比
03 创新点①Hamiltonian方法首次用于AUV有限时间控制
之前用Hamiltonian方法做AUV控制的工作(如Valentinis et al., 2013; Lv et al., 2022)都是无限时间收敛。本文第一次把有限时间控制引入这个框架,同时避免了能量整形和阻尼注入等传统手段。
②正交分解技术直接处理非线性
不依赖线性化近似,也不需要对系统做复杂的坐标变换。Lemma 4给出的正交分解方法具有通用性,可推广到其他非线性系统。
③自适应律应对参数摄动
模型参数在作业中很难精确获知。本文设计的自适应律能在线估计不确定参数,仿真中应对30%参数摄动仍保持10⁻³m精度。这对工程应用很实用。
④严格的理论证明
证明了有限时间稳定性和自适应有限时间稳定性,用到的Lyapunov函数构造方式有参考价值。特别是条件(3)的证明,展示了如何处理非线性系统中的有限时间收敛问题。
⑤全面的仿真对比
螺旋线+梳状线两种典型轨迹,三个场景(慢变扰动、突变扰动、参数摄动),三种控制器对比。结果表格清楚展示了各方法在收敛时间、超调、稳态误差上的差异,有说服力。
04 总结与展望这篇文章的工程直觉很直接:AUV在水下作业,时间就是效率,精度就是安全。作者从能量角度切入,用Hamiltonian方法把复杂的非线性问题简化为一个带能量函数的标准形式,再套上有限时间控制的框架,最后用自适应律处理参数不确定性。每一步都有明确的数学支撑,整体设计逻辑清晰。
从仿真结果看,AFSTTTC在收敛速度(6秒 vs 30秒)和稳态精度(10⁻³m vs 10⁻¹m)上都显著优于传统PCH控制,而且对参数摄动不敏感。对于水下对接、管道巡检这类对时间和精度都有要求的任务,这种控制器有明显优势。
不过,方法目前只针对全驱动AUV,参数也依赖模型。对于购买的商业AUV,获取完整的水动力参数有时不太现实。
未来研究将聚焦于以下几个方向:
🔸减少模型依赖:目前的控制器需要知道AUV的惯性矩阵、阻尼矩阵等参数。未来可结合数据驱动方法(如神经网络、高斯过程),从运行数据中学习不确定动力学,实现无模型或轻模型控制。
🔸扩展到欠驱动AUV:大部分商用AUV是欠驱动的(如只有纵荡、横摇、艏摇控制)。如何将Hamiltonian有限时间控制推广到欠驱动系统,需要重新设计能量函数和控制律结构。
🔸实验验证:目前停留在数值仿真。下一步应在水池或近海进行实船实验,验证控制器在真实海流、传感器噪声、执行器延迟下的表现。
🔸多AUV协同:对于协同探测任务,多个AUV需要保持编队。如何将单AUV的有限时间跟踪扩展到多AUV的分布式有限时间编队控制,是一个有挑战的方向。
🔸能量最优控制:有限时间收敛通常以更大的控制输入为代价。如何平衡收敛速度与能量消耗,在两者之间寻找Pareto最优解,值得进一步研究。
从“慢慢跟”到“快速准”,这套控制器的进步不仅是数学上的收敛阶变化,更意味着AUV能在更短的时间内完成更多任务——无论是水下应急响应、高效巡检,还是精准对接,时间窗口往往是任务成败的关键。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。