英文题目:Lattice structure musculoskeletal robots: Harnessing programmable geometric topology and anisotropy
中文题目: 晶格结构肌肉骨骼机器人:利用可编程几何拓扑和各向异性
作者:Qinghua Guan, Benhui Dai, Hung Hon Cheng, Josie Hughes
作者单位: 瑞士洛桑联邦理工学院(EPFL)
期刊:Science Advances(IF 13.6 中科院一区,JCR一区)
发表时间:2025年7月16日
链接:https://www.science.org/doi/10.1126/sciadv.adu9856
引文格式:Guan Q, Dai B, Cheng H H, et al. Lattice structure musculoskeletal robots: Harnessing programmable geometric topology and anisotropy[J]. Science Advances, 2025, 11(28): eadu9856.
01 全文速览自然界中,从柔软的大象鼻子到承重的骨骼,生物体通过巧妙组合不同力学特性的组织实现了丰富的运动功能。而今天的机器人,要么是硬质骨架+软体关节的多材料拼凑,要么只能在有限范围内调节刚度。
EPFL的Josie Hughes团队提出了一种全新的设计范式:仅用单一材料,通过编程晶格结构的几何拓扑,实现从柔软到刚硬的连续力学性能调控。他们开发了两种几何编程方法——拓扑调控(TR) 和叠加编程(SP),前者实现不同晶格类型之间的连续过渡,后者通过叠加不同方向或平移的晶格单元产生离散但可大范围调节的刚度和各向异性。两种方法组合,可生成超过100万种不同的晶格单元,杨氏模量覆盖20~280 kPa的范围。
图1 展示了大象的生物结构(A)与本文仿生机器人(B、C)的对比。大象拥有柔软的鼻子和刚硬的腿,本文用单一材料通过晶格结构编程实现了这两种截然不同的力学特性。
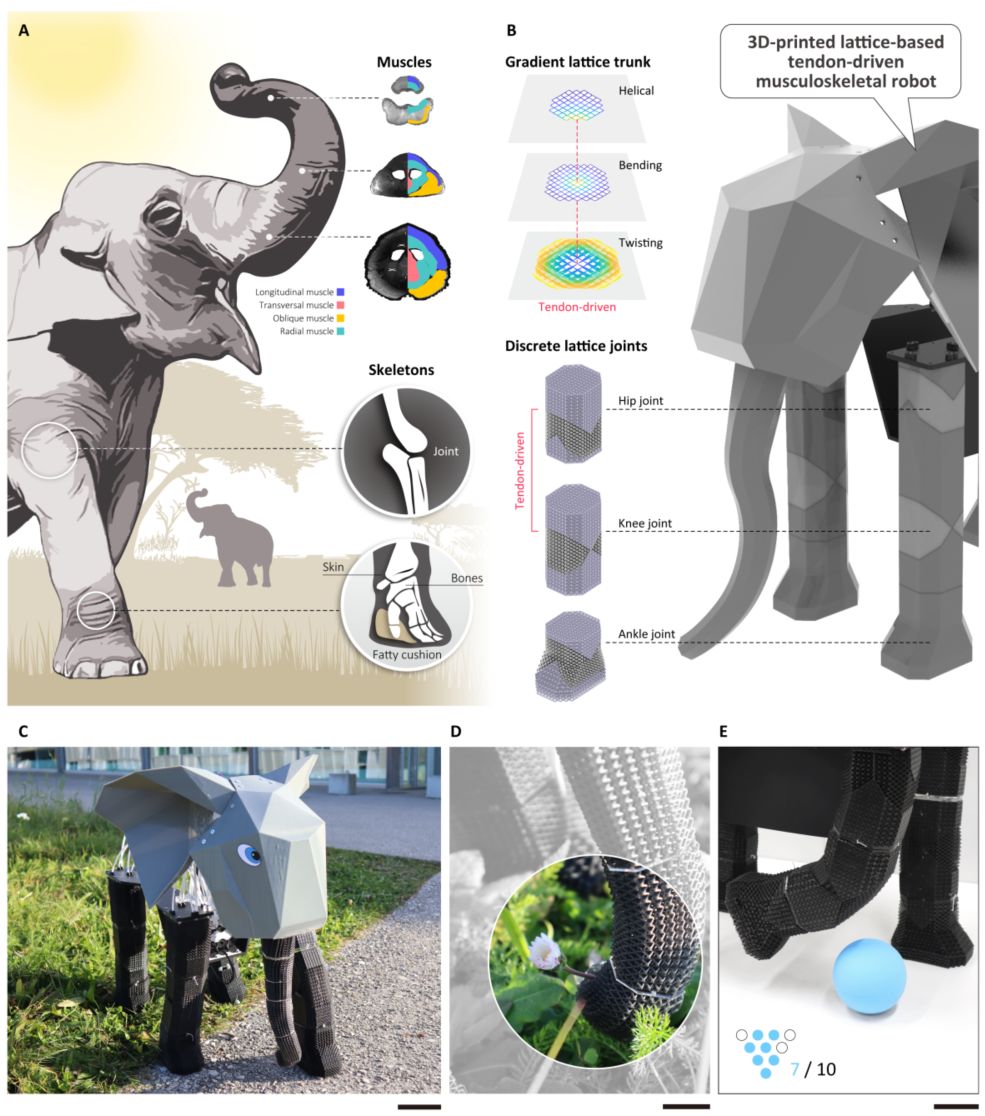
图 1 晶格肌肉骨骼机器人的概念。 (A) 大象肌肉骨骼系统的灵感。 (B) 3D 打印点阵肌肉骨骼机器人的结构设计。 (C) 光学图像展示了大象机器人的物理外观。 (D) 放大图像显示一朵花被机器人树干捏住。 (E) 机器人抬起腿踢保龄球。
作为概念验证,他们用这两种方法设计并制造了一整只仿生大象机器人,包括:能够弯曲、扭转、螺旋运动的柔软象鼻,以及能够支撑4倍自重负载、实现前后和侧向行走的刚性腿部。整个机器人仅使用一种弹性树脂材料3D打印完成,通过肌腱驱动,无需任何额外的刚性构件。
核心亮点:
✅单一材料,连续刚度调控:从柔软组织到承重骨骼,仅靠几何拓扑变化实现
✅两种几何编程方法:TR实现连续过渡,SP实现离散大范围调控
✅超百万种晶格单元:杨氏模量20~280 kPa,剪切模量1.38~40 kPa
✅仿生大象机器人:柔软象鼻(弯曲69.6°、扭转78.1°)+ 刚性承重腿(支撑4 kg)
✅轻量化高性能:象鼻自重150g可提500g物体,腿部可承受4kg额外负载
02 研究内容🧱2.1晶格结构的几何编程方法
动物组织的刚度从软组织的1 kPa以下到骨骼的30 GPa以上,跨度极大。本文的目标是用单一材料通过几何设计覆盖尽可能宽的刚度范围。他们从两种基础晶格单元出发:bcc(体心立方) 和XCube。bcc具有立方对称性,准各向同性;XCube则具有显著的力学各向异性。
图2 展示了生物组织的刚度范围(A),两种几何编程方法的示意图(B),以及通过TR和SP可实现的杨氏模量和剪切模量范围(C)。菱形形状的宽窄反映了各向异性的程度。
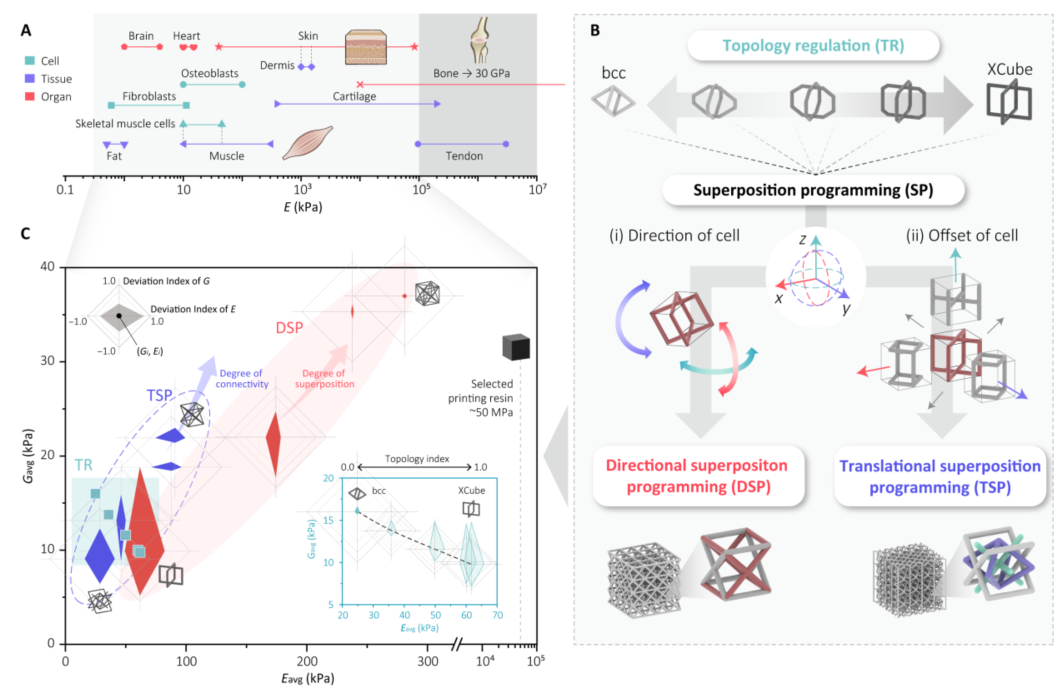
图 2 通过不同形式的拓扑编程可实现一系列机械性能。 (A) 生物系统中不同组织和结构杨氏模量的范围 (39-41)。 (B) 两种几何规划方法,TR 和 SP。 SP包括DSP和TSP。 (C) 通过不同的几何规划可实现的杨氏模量和剪切模量的范围。剪切模量和杨氏模量的各向异性范围通过基于金刚石的形状突出显示。
第一种方法:拓扑调控(TR)
TR实现两种晶格类型之间的连续过渡。他们定义了一个拓扑指数TI,TI=0对应纯bcc,TI=1对应纯XCube,中间值对应两种结构的连续混合。
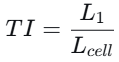
其中 L_1是沿z轴的直梁长度, L_{cell}是晶格单元的尺寸。图3 展示了从bcc到XCube的连续几何过渡过程(A-D),以及两种极端结构在各方向上的杨氏模量和剪切模量对比(B)。随着TI增加,z方向的刚度增长远快于x、y方向。
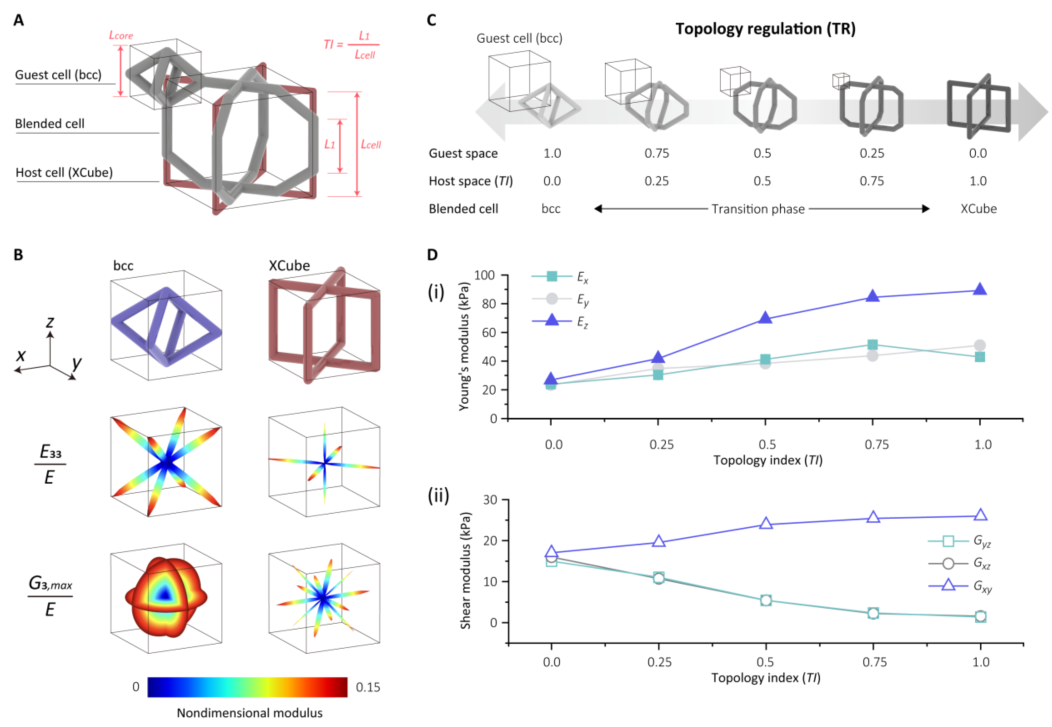
图 3 TR 方法用于从一种几何体到另一种几何体的连续混合。 (A) BCB 晶格结构示意图。 (B) 我们在 bcc 和 XCube 之间混合的两种不同晶格类型及其在无量纲杨氏模量和剪切模量中的各向异性。 (C) bcc 和 XCube 之间的拓扑传输示意图。 (D) 从 bcc 到 XCube 的几何规则表示以连续方式随着 TI 指数的增加而变化。
第二种方法:叠加编程(SP)
SP通过叠加不同方向或平移的晶格单元来创造新的单元类型。图4展示了两种叠加方式:方向叠加(DSP)和平移叠加(TSP)。DSP通过叠加不同朝向的XCube单元,可显著增强特定方向的刚度;TSP通过平移单元增加连接性,可将剪切模量提升8倍以上。图中展示了从单单元到四单元叠加的结构演变(A),以及不同叠加方式下杨氏模量和剪切模量的变化曲线(B、C)。
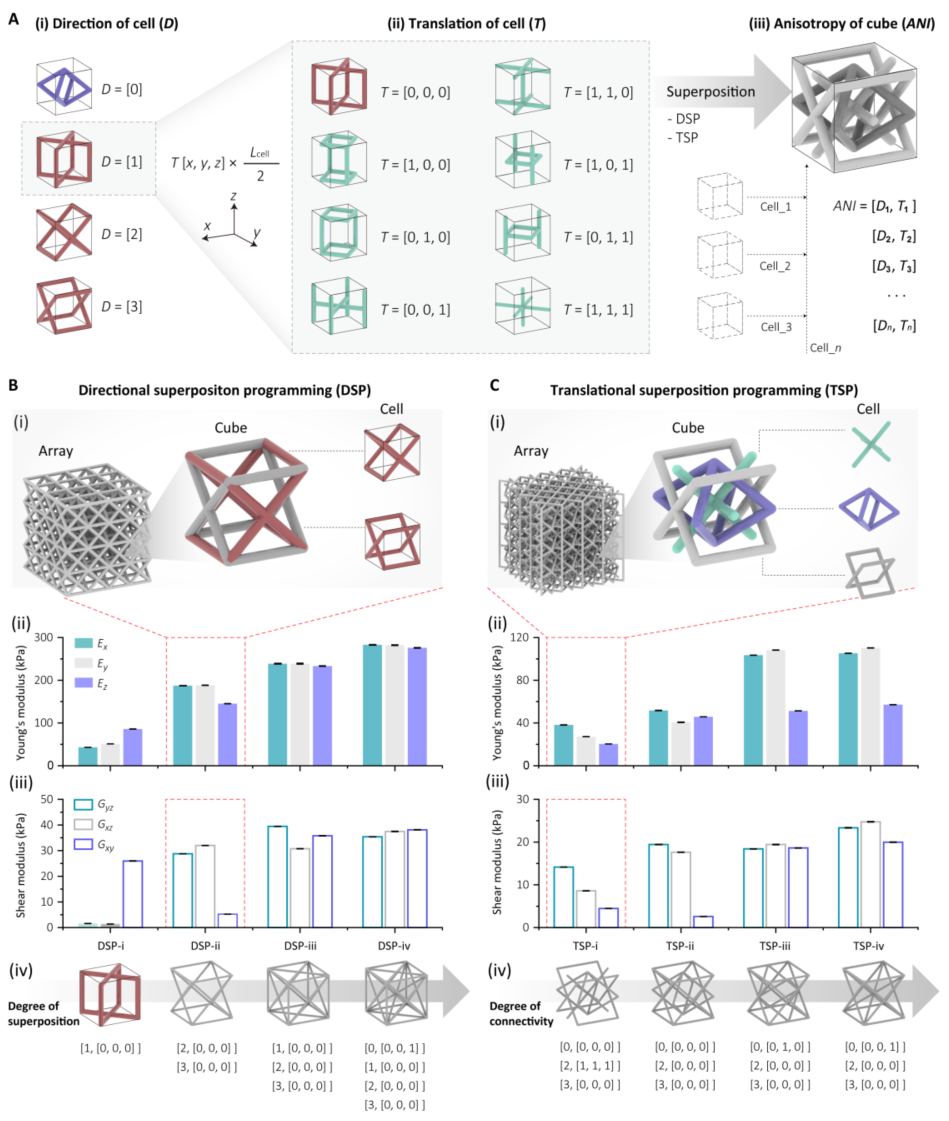
图 4 用于各向异性调节的 SP 方法。 (A) 两种叠加方法,包括改变单元的方向 (i) 和平移 (ii),可用于对立方体 (iii) 的各向异性进行编程。 (B 和 C) 由 DSP (B) 和 TSP (C) 编程的立方体的机械特性。 (i) 一个特定立方体样本的放大结构。 (ii) 立方杨氏模量。 (iii) 立方体的剪切模量。 (iv) 示意图显示了具有增加的叠加/连通性的立方体
🦵2.2肌肉结构:TR方法实现连续变形模块
利用TR方法,他们设计了三种肌腱驱动的肌肉结构,分别实现弯曲、扭转和螺旋运动。
图5展示了这三种结构。弯曲模块(A)采用径向梯度:外圈bcc(低轴向刚度)、中心XCube(高轴向刚度),单根中心肌腱拉动时产生弯曲,最大角度69.6°,比非梯度结构提升30%。扭转模块(B)采用反向径向梯度:外圈XCube(低剪切刚度)、中心bcc(高剪切刚度),配合预扭转载荷,肌腱拉动时产生扭转,最大角度78.1°。螺旋模块(C)采用轴向旋转的梯度场,拉动时产生螺旋变形。
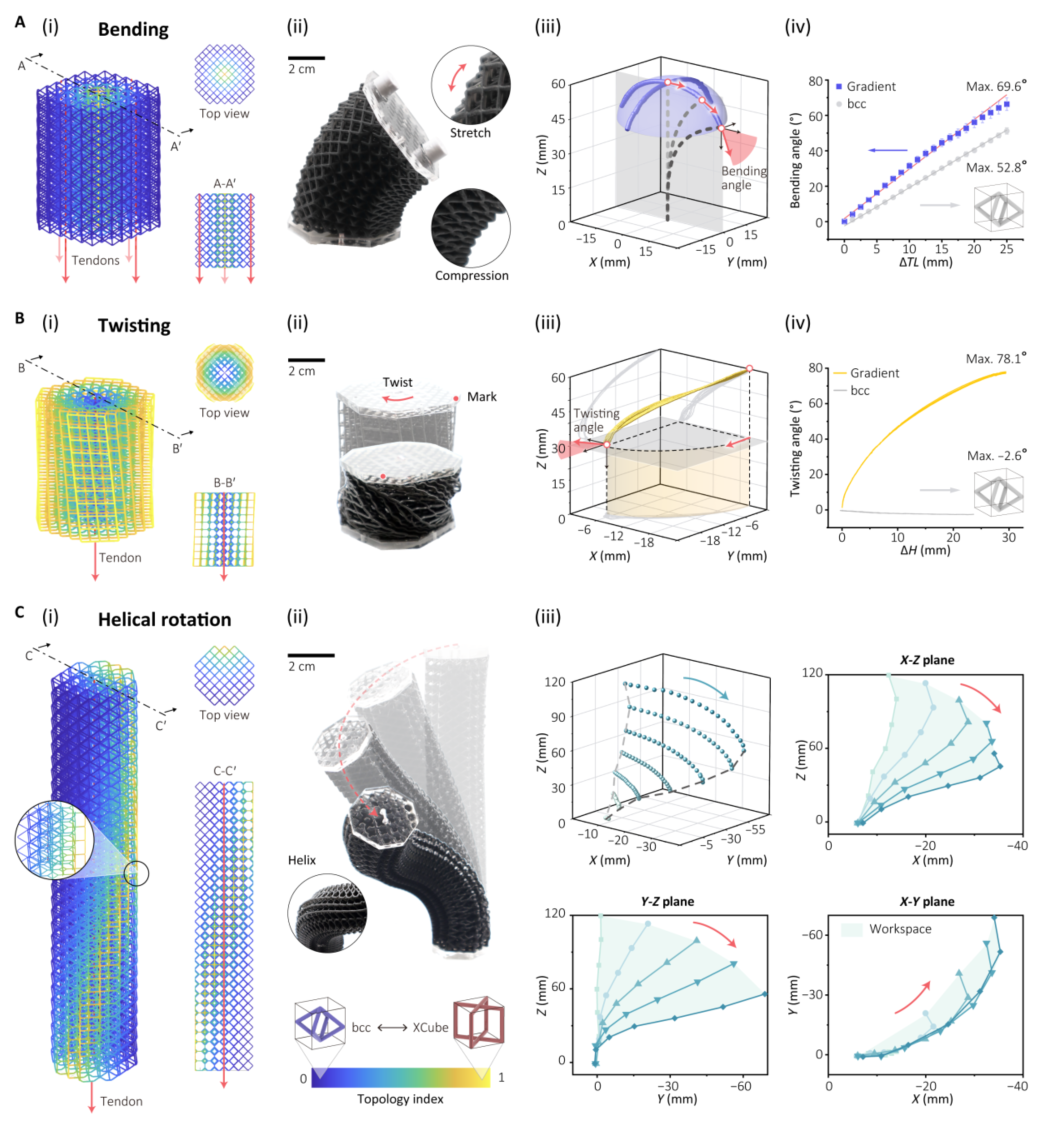
图 5 拓扑调节的肌肉结构可进行多种运动。 (A) 弯曲运动。 (B) 扭转运动。 (C) 螺旋运动。 (i) 肌肉结构和肌腱布局的示意图。 (ii) 运动的实验变形。 (iii) 肌肉结构的工作空间。 (A, iv) 不同肌腱长度 (ΔTL) 的肌肉结构的弯曲角度。 (B, iv) 不同高度 (ΔH) 的肌肉结构的扭转角度。
🦴2.3骨骼关节:SP方法实现离散运动关节
利用SP方法,他们设计了三种肌腱驱动的骨骼关节,分别实现滑动、单轴弯曲和双轴弯曲。
图6 展示了这三种关节。滑动关节(A)采用XCube的低剪切模量特性,两对X形肌腱正交布置,可实现xy平面内的双向滑动(最大30mm和25mm)。单轴关节(B)使用四叠加晶格作为“骨骼”、双叠加晶格作为“韧带”,可实现±50°的弯曲。双轴关节(C)采用正交布置的四叠加晶格“骨骼”+ bcc“韧带”,四根肌腱均匀分布,可实现任意方向的约40°弯曲(对应论文 Fig. 6)。
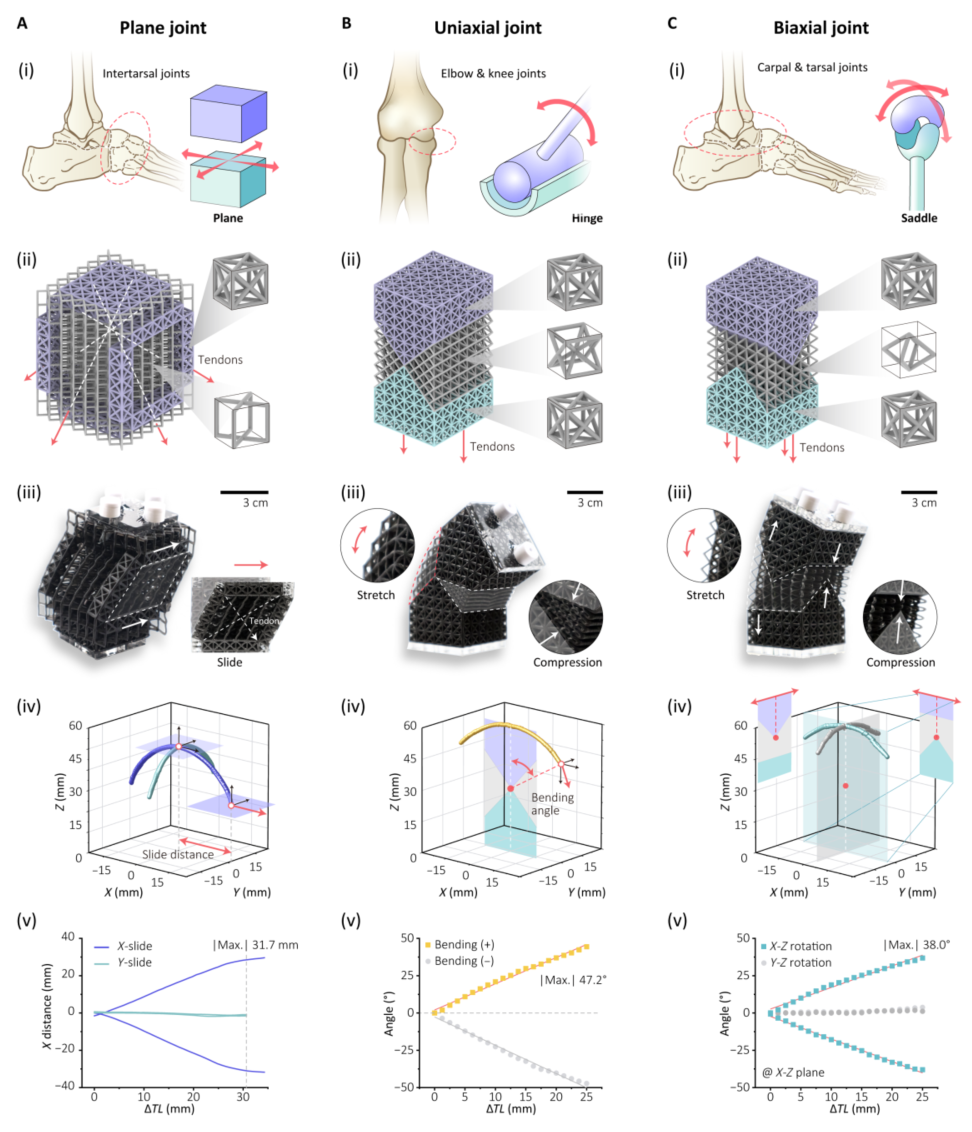
图 6 用于多种运动的叠加编程骨骼关节。 (A) 用于滑动的平面接头。 (B) 用于弯曲的单轴接头。 (C) 用于双向弯曲的双轴接头。 (i) 生物系统中关节的示意图和机制。 (ii) 骨骼关节和肌腱布局的示意图。 (iii) 运动的实验变形。(iv) 骨骼关节的工作空间。 (v)不同肌腱长度的骨骼关节的变形程度。
🐘 2.4 整只大象机器人:软硬一体的仿生集成
最后,他们将上述模块集成到一只完整的仿生大象机器人中。
图7 展示了大象机器人的整体设计。象鼻(A-i)由扭转、弯曲、螺旋三段组成,每段的晶格尺寸和梁厚从根部到尖端逐渐减小,兼顾承重和灵巧性。腿部(A-iii)包含髋关节(2-DoF)、膝关节(1-DoF)和被动踝关节,通过肌腱驱动实现前后步态和侧向步态(C)(对应论文 Fig. 7)。
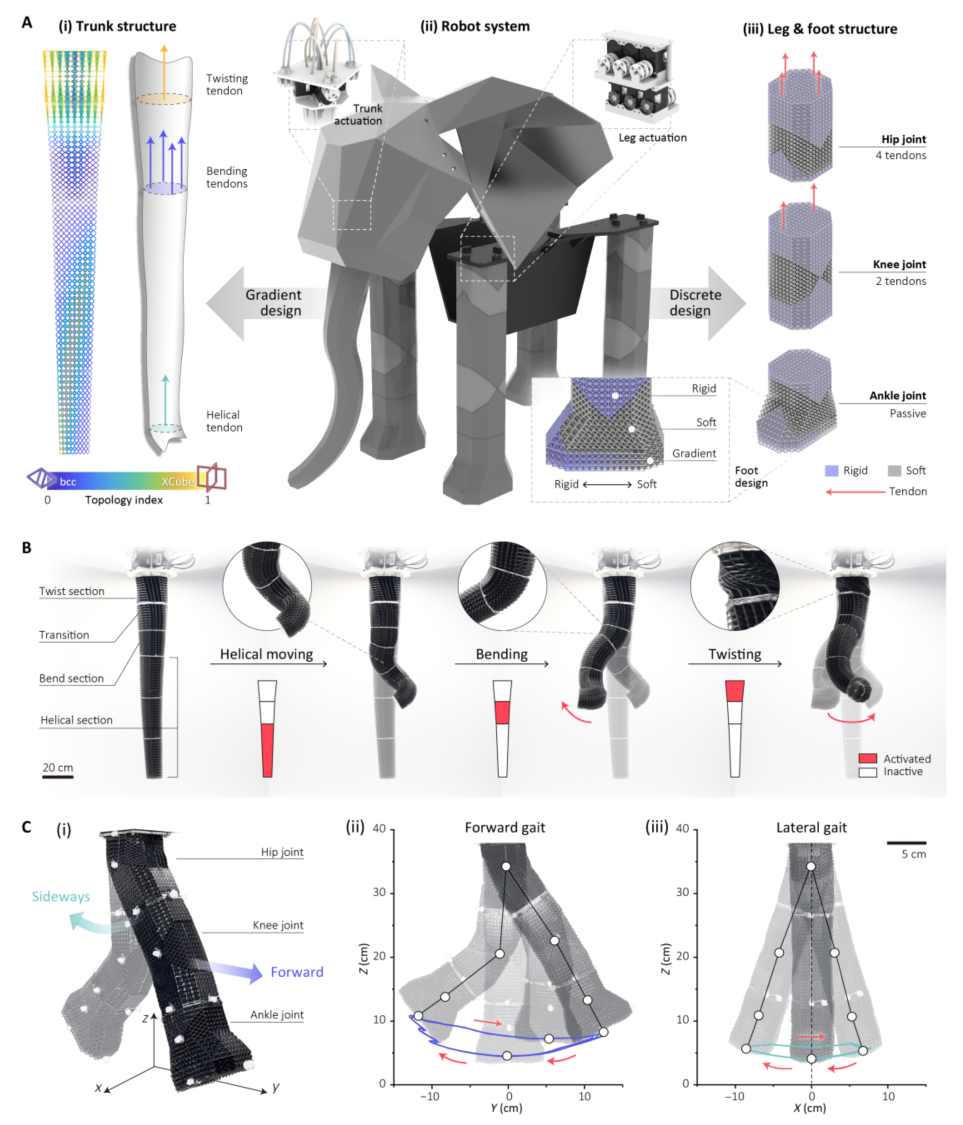
图 7 大象机器人的设计。 (A) 大象机器人的结构设计。 (i) 树干的梯度晶格结构。 (ii) 具有电机驱动的机器人系统。 (iii) 腿和脚的离散网格结构。 (B) 象鼻的综合移动性能。 (C) 示意图展示了象腿的两种典型步态,包括向前步态 (ii) 和横向步态 (iii)。
图8 展示了大象机器人的综合能力。A为整体结构组成,B展示足部在不同地形上的适应性,C展示象鼻从花瓶中取花的完整过程(螺旋上升+夹取+提起),D展示机器人在动态行走时的重心协调机制和步态。

图 8 展示大象机器人的能力。 (A)大象机器人的整体外观及结构组成。 (二)象脚对各种地形和环境的适应性。 (C) 通过组合不同的部分,树干可以从花瓶中抓取一朵花。 (D) 协调重心和步态,实现仿生行走。
性能数据:
象鼻:自重约150g,可提起500g物体(3倍自重),抓取范围从0.1mm薄膜到100mm圆柱
腿部:可额外承载4kg重量(超过自重100%),可在三腿支撑下稳定抬腿
行走:步速约7.5 mm/s,步长约150mm
环境适应性:足部前硬后软,在不平地形上保持稳定;中空晶格结构使其可在水中运行
03 创新点①单一材料实现软硬连续调控
传统多材料3D打印只能提供有限几种离散的刚度选择。本文用纯几何方法实现了从20kPa到280kPa的连续刚度覆盖,且通过TR方法可在空间上平滑过渡,这是向“结构即材料”迈出的重要一步。
②两种几何编程方法互为补充
TR适合连续渐变(如肌肉器官),SP适合离散大范围调控(如骨骼关节)。两者可独立使用也可组合,产生超过100万种晶格单元类型。这种设计空间的开阔程度在晶格超材料领域很少见。
③从单元到系统:完整的仿生机器人演示
不只是做材料表征,而是真正用这些晶格单元造出了一个完整的、功能性的机器人。象鼻的螺旋运动、腿部的多关节步态、足部的前硬后软设计,每一处都体现了“力学性能编程”的设计思想。
④轻量化与功能集成
中空晶格结构使机器人整体重量很轻(整机约4kg),同时通过结构本身实现了关节约束和运动范围控制,减少了对外部限位机构的需求。象鼻的梯度设计使各段功能相对解耦,简化了控制。
⑤开源可复现
所有晶格设计代码、3D打印参数、机器人装配方案均已开源,其他实验室可直接复现和扩展。
04 总结与展望这篇工作的核心信息很简洁:形状决定力学性能,而几何是可以编程的。他们用两种基础晶格、两种编程方法,打开了一个巨大的设计空间,然后用这个空间造了一只大象。这个思路的优雅之处在于——不需要发明新材料,只需要重新思考结构的几何。
当然,目前的工作还有提升空间。晶格结构的刚度范围(最大280kPa)离真实骨骼(GPa级别)还有差距,但通过调整梁厚或改用更硬的基础材料可以进一步扩展。此外,晶格结构在循环加载下存在迟滞和疲劳问题,长期可靠性需要验证。目前的设计和优化依赖实验数据插值和遗传算法,如果能结合有限元分析和数据驱动方法,可以更高效地探索这个巨大的设计空间。
未来研究将聚焦于以下几个方向:
🔸 扩展刚度范围:通过改变梁厚、采用更硬的基础材料(如刚性光敏树脂或金属),将刚度范围向骨骼级别(GPa)扩展,实现真正的“骨-肌腱-肌肉”全谱系覆盖。
🔸集成感知功能:晶格结构的空腔非常适合嵌入传感器(如导电材料、光纤)。可借鉴LattiSense等工作的思路,让结构同时承担力学和感知功能。
🔸多材料融合:在单一几何编程的基础上,引入第二种材料(如导电材料或水凝胶),可进一步扩展功能维度(如电活性、生物相容性)。
🔸自动化设计工具:开发基于深度学习或拓扑优化的设计工具,输入期望的变形模式,自动输出晶格几何分布。
🔸动态与冲击性能:目前主要关注准静态变形。晶格结构在动态加载和冲击下的能量吸收特性值得深入研究,这对足式机器人的落地冲击有重要意义。
如果你可以用这种晶格编程方法设计一个机器人,你最想造什么?是仿生动物、柔性机械臂,还是某种自适应结构?欢迎在评论区分享你的想法。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。