英文题目:Robot metabolism: Toward machines that can grow by consuming other machines
中文题目: 机器人代谢:走向能够通过消耗其他机器来生长的机器
作者:Philippe Martin Wyder, Riyaan Bakhda, Meiq Qiho, Quinn A. Booth, Matthew E. Modi, Andrew Song, Simon Kang, Jiahao Wu, Priya Patel, Robert T. Kasumi, David Yi, Nihar Niraj Garg, Pranav Jhunjhunwala, Siddharth Bhutoria, Evan H. Tong, Yuhang Hu, Judah Goldfeder, Omer Mustel, Donghan Kim, Hod Lipson
作者单位: 美国哥伦比亚大学等
期刊:Science Advances(IF 13.6中科院一区,JCR一区)
发表时间:2025年7月16日
链接:https://www.science.org/doi/10.1126/sciadv.adu6897
引文格式:Wyder P M, Bakhda R, Qiho M, et al. Robot metabolism: Toward machines that can grow by consuming other machines[J]. Science Advances, 2025, 11(28): eadu6897.
01 全文速览生物体是开放系统:从环境中吸收物质、排出废物,在这个基础上实现了生长、修复和繁殖。而今天的机器人是封闭系统——出厂时的形态基本决定了它的一生。AI可以让机器人的“大脑”快速进化,但身体却一成不变。
哥伦比亚大学Hod Lipson团队提出了 “机器人代谢”(Robot Metabolism) 的概念:让机器能够通过消耗其他机器或零部件来生长、修复和重组。他们设计了一种名为 Truss Link 的模块化机器人单元——一个可以伸缩、带有磁性连接器的杆状模块。多个Truss Link可以自组装成不同的拓扑结构,从一维爬行单元逐步发育成二维平面结构,再折叠成三维四面体,最后通过“吃掉”另一个模块变成更快的棘轮四面体。
图1 展示了整个发育序列:从单个模块到完全组装的棘轮四面体机器人。

图 1 机器人代谢发育序列:从单个模块到棘轮四面体,机器人新陈代谢使机器能够“成长”。机器人模块可以通过消耗和重复使用来自其环境和其他机器人的部件来增长。这种能力对于生物生命体至关重要,对于发展自我维持的机器人生态至关重要。本文详细演示了上述开发顺序:从单个模块到完全组装的棘轮四面体机器人。
整个发育过程完全依靠机器人自身的能力,无需外部机械辅助。实验在近4米长的多级斜坡环境中完成,通过遥控操作(模拟自主决策)实现了全部拓扑转换。模拟显示,部分形态(如钻石-尾巴结构)在随机条件下有44.3%的自发形成概率。此外,他们还演示了损伤后自我恢复、替换“死亡”模块以及机器人辅助其他机器人生长等能力。
核心亮点:
✅机器人代谢:首次提出并验证了机器通过消耗和整合外部模块来物理生长的概念
✅Truss Link设计:低成本(单模块约200美元)、自由形态磁性连接器、可伸缩、可主动脱离
✅多阶段发育:从一维到三维、从简单到复杂,展示了五个拓扑递进
✅损伤恢复与替换:断连后重组、主动抛弃故障模块并拾取替换件
✅机器人助产:一个机器人辅助另一个机器人从二维平面“站起来”变成三维四面体
02 研究内容🧩 2.1 Truss Link:一个能伸缩、能连接的模块
Truss Link是一个杆状机器人模块,两端各有一个自由形态的磁性连接器。它内置两个线性伺服电机,可以伸缩,最大伸长率53%(从28cm到43cm)。连接器内部有一个可旋转的球形钕磁铁,可以被动对齐极性;需要脱离时,电机将磁铁拉回连接器内部,减弱外部磁场。
图2 展示了Truss Link的结构和连接器细节:A-B为收缩和展开状态,C-D为连接器内部结构和磁铁缩回状态,E-G展示了2、3、4个连接器连接在一起的灵活性。
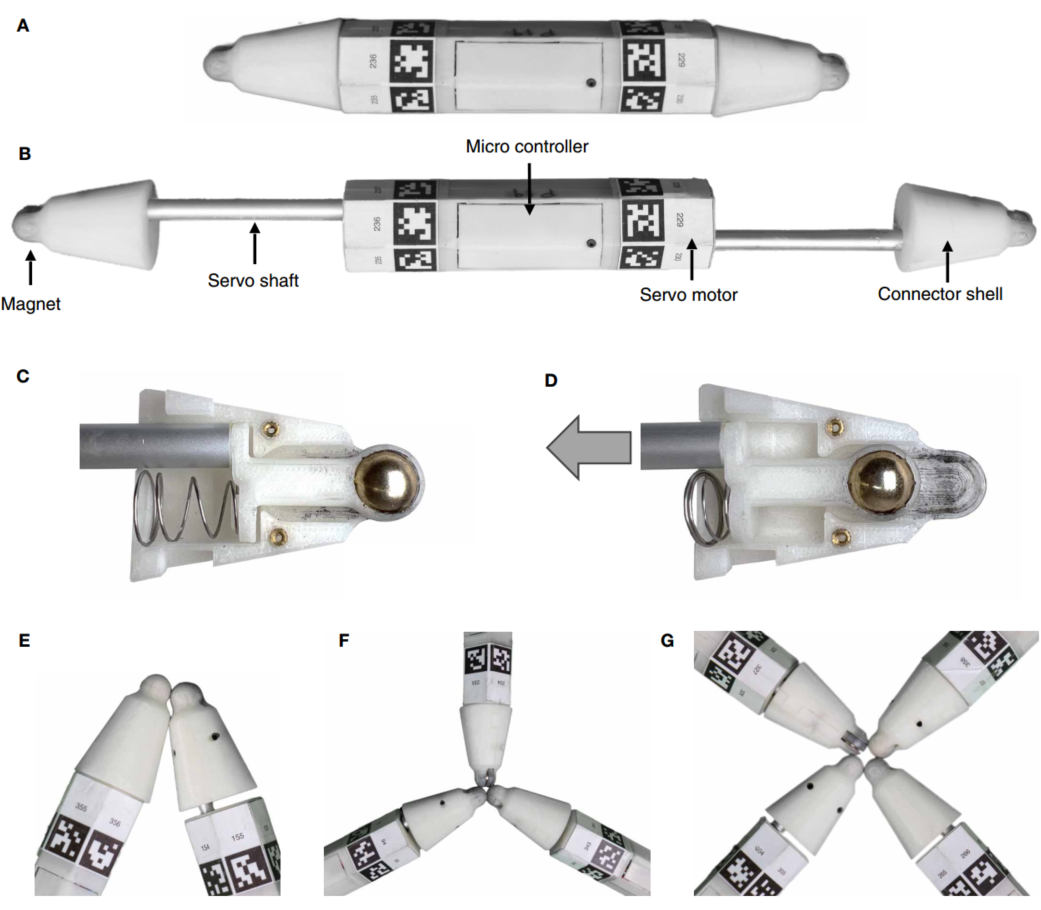
图 2 Truss Link的结构与连接器,桁架连杆可以扩展和收缩、连接和分离,以及同时连接到多个其他桁架连杆。 (A) 收缩桁架连杆长 28 厘米,重 280 克 (B)。完全展开后,桁架连杆的长度可增加 53% 以上,达到 43 厘米。图像(C 和 D)分别显示了处于活动状态(磁铁在尖端暴露)和完全收缩(即磁铁缩回的非活动状态)的磁铁连接器的内部。连接器内部的锥形压缩弹簧在将磁铁连接器缩回后将其重置为活动状态,因此 Truss Link 已准备好再次连接。球形钕磁铁由磁铁支架固定到位。当另一个磁铁接近时,磁铁支架允许磁铁自由旋转以旋转到平衡位置。这种机制确保了多个链接之间从广泛且连续的角度范围内的牢固连接。我们展示了 (E) 两个、(F) 三个和 (G) 四个连接器之间的连接。
单个Truss Link只能在一维方向上蠕动。但当多个模块连接成特定拓扑(如三角形、四面体)时,整个系统就能获得二维或三维的运动能力。
🌱 2.2 多阶段发育:从零件到棘轮四面体
实验环境是一个近4米长、带斜坡和台阶的多级平台。七个Truss Link从第一阶段开始,逐步发育:
1. 个体→三角形 + 三星:六个独立模块自组装成一个三角形和一个三叉星
2. 三角形 + 三星→钻石-尾巴:三角形“吸收”三叉星,形成钻石-尾巴结构
3. 钻石-尾巴→四面体:钻石-尾巴爬下台阶、靠在障碍物上,自我折叠成四面体
4. 四面体→棘轮四面体:四面体发现一个躺在地上的模块,连接并拾起它,变成行走更快的棘轮四面体
图3 展示了整个实验过程的四个阶段、五个拓扑转换。图中B为实验台布置,C-E为关键帧序列。
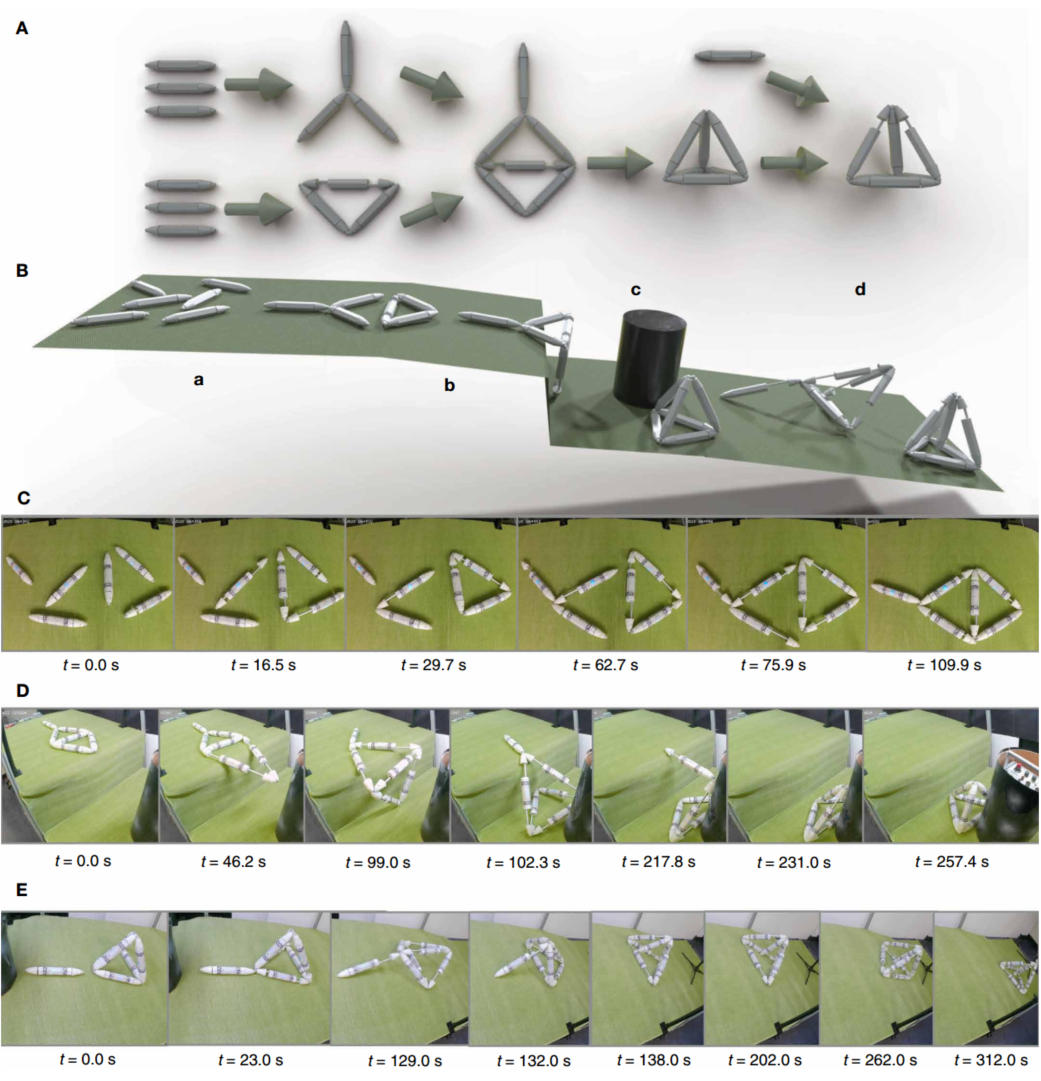
图 3 机器人多阶段发育实验,Truss Links 可以通过吸收和整合材料来开发 3D 结构。 (A) 显示了一系列拓扑转变,从左侧的一组单独链接开始,到右侧以棘轮四面体拓扑结束。从六个独立的连杆开始,三个连杆结合形成三尖星形,另外三个结合形成三角形。接下来,三角形通过连接来吸收三尖星形,并成为菱形尾部拓扑。然后,带尾的菱形将自身折叠成四面体。接下来,四面体找到并整合一个自由的桁架连杆,将其从地面连接起来,形成一个棘轮四面体。 (B) 显示了实验环境的剖面图(不按比例),以部分标签 (B-a) 到 (B-d) 作为参考,阐明了 (C) 到 (E) 中所示的每个转变发生的位置。 (C)、(D) 和 (E) 中的帧序列分别显示了带尾菱形、四面体机器人和棘轮四面体的形成。
棘轮四面体的行走速度比普通四面体快约66.5%(在10°斜坡上)。图4 比较了四种拓扑的归一化移动速度。
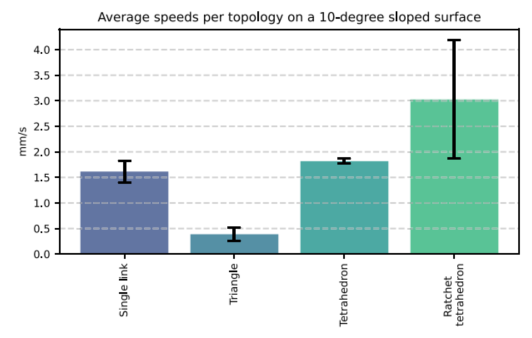
图 4 不同拓扑结构的行走速度对比,棘轮四面体机器人以牺牲一致性为代价获得速度。该图直观地显示了单个桁架连杆、三角形、四面体和棘轮四面体的运动速度。误差线显示平均值的标准差。实验在平坦、铺有地毯、坡度 10° 的场地上进行。
🎲 2.3 随机组装概率:自发形成的可能性有多高?
为了评估这些形态在随机行为下的自发形成概率,他们在PyBullet中进行了2000次仿真,每次20分钟,随机初始化模块位置和随机控制指令。
图5 显示了各种形态的出现概率。钻石-尾巴的出现概率高达44.3%,但三角形和三叉星同时出现的概率只有9.2%。四面体和棘轮四面体的自发形成概率极低(接近0),说明它们需要更精细的控制——这也是为什么他们在物理实验中使用了人机操作(模拟未来的自主决策)。
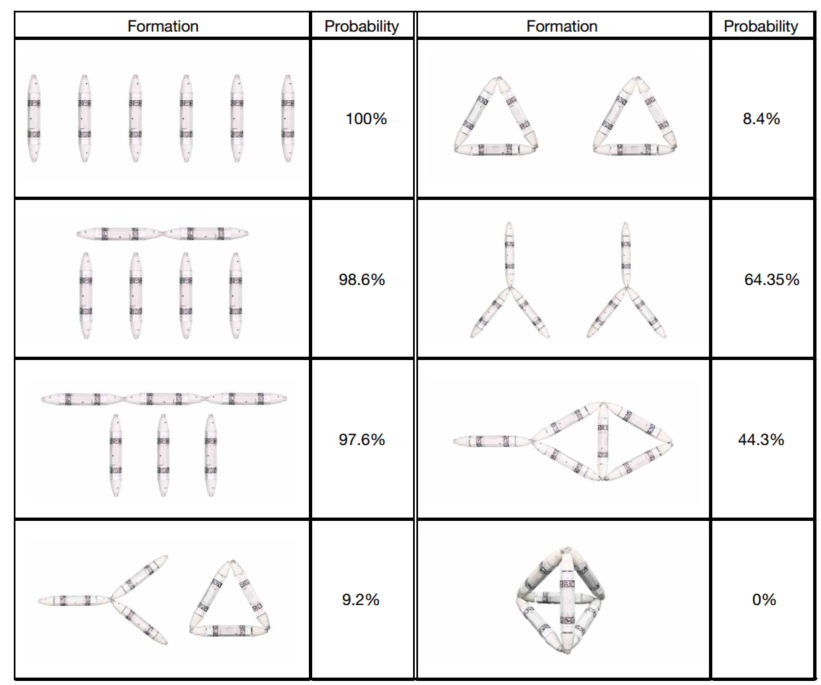
图 5 超过 2000 次 20 分钟模拟运行的模拟随机拓扑形成概率。
🔧 2.4 损伤恢复与替换死亡模块
损伤恢复:让三角形、三叉星和钻石-尾巴从30cm高的台阶跌落,导致连接断开。图6 展示了一个三角形跌落后断开一个连接,通过伸缩动作重新连接并恢复形状的过程。图7 展示了三叉星和钻石-尾巴的成功恢复。
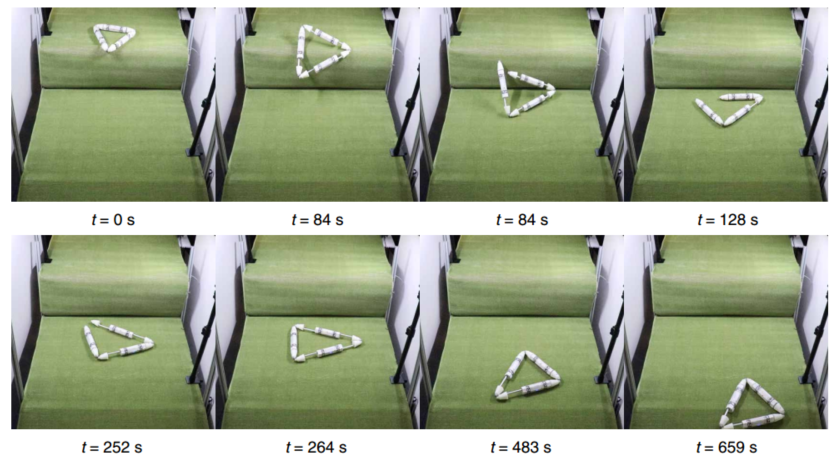
图 6 三角形损伤后自我恢复,Truss Link 三角形机器人在撞击后恢复形状。 Truss Link 三角形机器人从壁架上爬下来,由于冲击而断开连接,继续恢复其三角形形状,然后爬走。
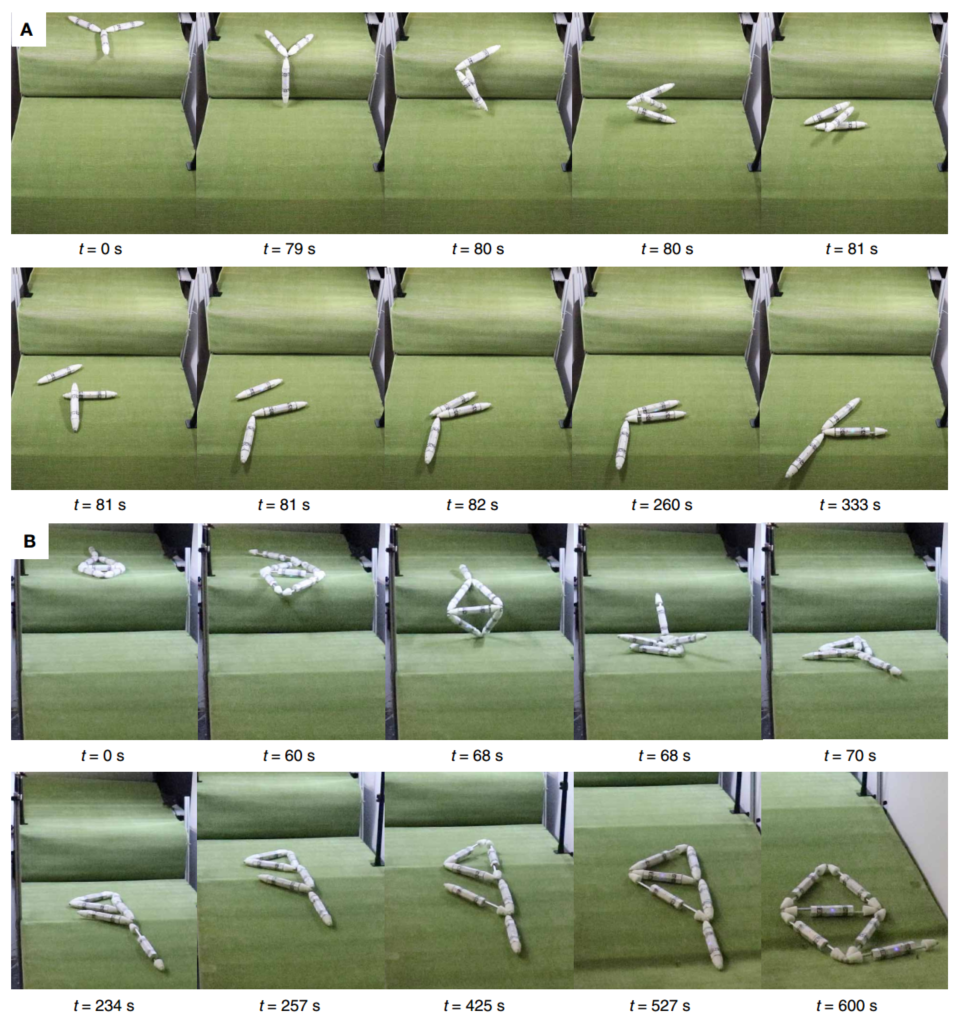
图 7 三叉星和钻石-尾巴的损伤恢复,基于桁架连杆的三点星形和菱形尾部机器人在因冲击而断开连接后恢复其原始形状。 (A) 一个三点星型机器人从壁架上爬下来,并断开了所有桁架连杆连接。然后机器人恢复三尖星形状并爬走。 (B) 一个桁架连杆菱形尾机器人从壁架上爬下来,分成一个三尖星形机器人和一个三角形机器人。三尖星机器人落在三角机器人上方。接下来,三尖星机器人爬出三角形并重新连接到它,最终恢复菱形尾巴形状。
替换死亡模块:棘轮四面体的一根“拐杖”模块电量耗尽,触发“程序性死亡”(主动收缩并脱离)。图8 显示了该机器人如何找到地面上的一个备用模块,先连接备用模块,然后让死亡模块脱离,再通过翻滚移动到合适位置,最终拾起新模块并继续行走。
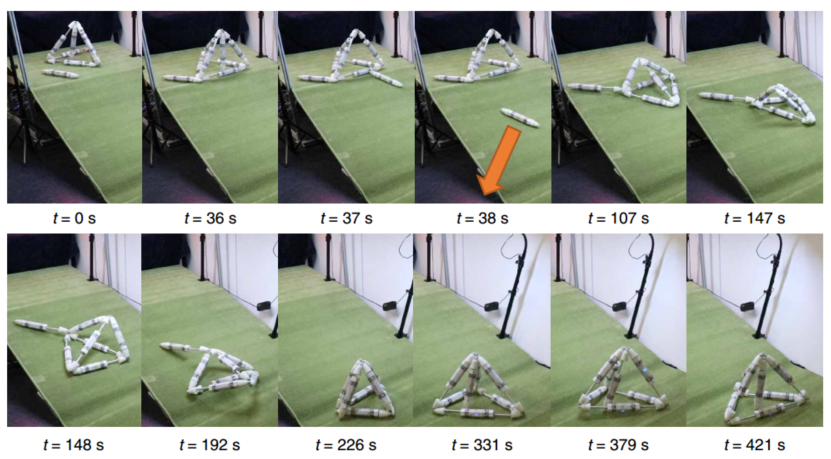
图 8 棘轮四面体替换死亡模块,棘轮四面体脱落“死”棘轮桁架连杆并拾取替代品。棘轮四面体接近单个桁架连杆并锁定它。接下来,它摆脱了死链接:完全收缩且分离的“死”桁架链接从四面体上脱落并滚下斜坡。然后四面体会翻转两次,重新调整方向以拾取新发现的桁架连杆。在 t = 192 s 处拾取后,四面体将桁架连杆摆动到其中心并逐渐远离。
🤝 2.5 机器人辅助重构:一个机器人帮另一个“接生”
最后一个实验展示了机器人之间的协作。一个已经成形的棘轮四面体,将一个二维平面布局的三角形+三叉星“钓”起来,帮助它们连接成三维四面体。图9 展示了整个过程:棘轮四面体用它的“拐杖”穿过平台上的孔洞,勾住下方结构的顶点,然后收缩升起,使三叉星与三角形的自由顶点连接,形成四面体。之后,棘轮四面体脱离,新生的四面体自己爬走。
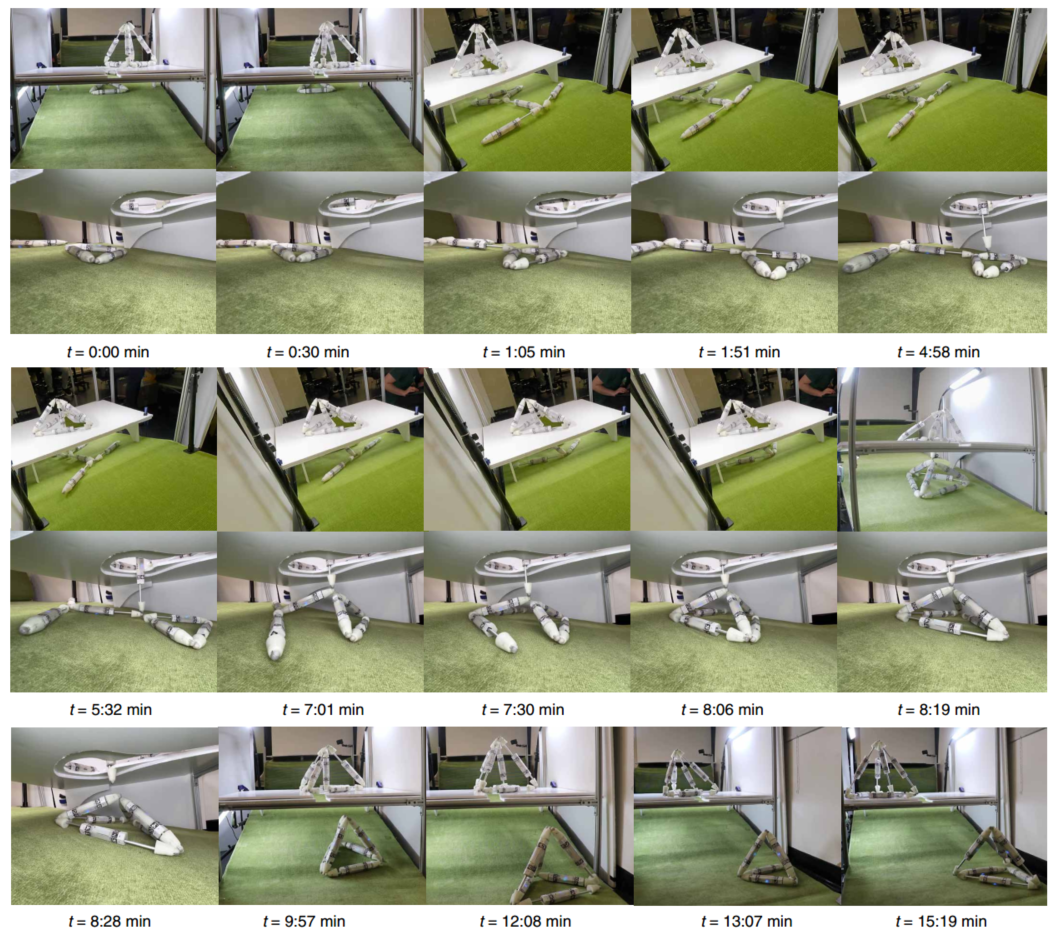
图 9 机器人辅助重构:棘轮四面体帮助形成新的四面体,棘轮四面体将二维机器人升起成为四面体机器人。棘轮四面体使用其棘轮桁架连杆穿过白色平台上的孔,到达三角形和三尖星连接的顶点。三尖星被举起后,与三角形的两个自由顶点相连,形成四面体。帧序列中不同的、时间同步的摄像机角度是根据哪个摄像机提供每个阶段信息最多的视图来选择的。
这个实验表明,一旦某个机器人形态被“发明”出来,它可以协助其他机器人完成同样的发育过程,而不必让每个新机器人从零开始经历跌落和折叠的风险。
03 创新点① 首次系统提出并验证“机器人代谢”
以往的自重构模块化机器人更多关注形状改变,但很少有工作强调“通过消耗外部材料来生长”这一代谢本质。本文明确给出了两条标准:① 不能依赖外部机械辅助;② 只能消耗同质模块和能量。这为未来的机器人生态系统提供了一个清晰的定义。
② Truss Link的设计取舍:简单、低成本、可复制
每个模块成本约200美元,使用现成的线性伺服电机和球形磁铁,3D打印外壳。放弃了许多模块化机器人常见的跨模块通信和供电功能,换来了连接的自由度和机构的简洁性。连接器可以在很大角度范围内被动吸附,不需要精确对准。
③ 多阶段发育的完整演示
从一维到三维、从单模块到六模块,五个拓扑递进、四个发育阶段,全部在物理平台上实现。这是目前展示“机器人个体发育”最完整的案例之一。
④损伤恢复和模块替换
利用磁性连接作为预设断裂点,降低了硬件损坏风险。通过主动脱离机制实现了类似生物“细胞凋亡”的功能——抛弃故障模块,并能够从环境中找到替换件。
⑤机器人之间的协作生长
最后一个实验展示了“助产”行为:一个成熟形态的机器人帮助另一个未成熟的结构完成关键转变。这暗示了在机器人生态中,发育可以不是孤立的,而是可以代际传递的。
04 总结与展望Hod Lipson团队十多年前做过自我复制机器人,这次他们走得更远——不只是复制,而是让机器人像生物一样,通过吸收外部物质来改变自己的大小和能力。Truss Link的设计并不复杂,甚至可以说有点“简陋”——200美元的成本、3D打印外壳、现成的伺服电机——但正是这种简洁,让这个演示具有了可复制性。任何实验室都可以按照他们开源的图纸和代码复现。
当然,目前的工作还有很多局限:模块数量只有7个,控制依赖人工遥控,运动速度慢,地形敏感,模块可靠性不高(连接器容易松脱)。但这些都不妨碍“机器人代谢”这个概念的启发性——它指向的是一个更长期的愿景:未来的机器人不是被设计成特定的形态,而是由大量廉价的、同质的、可互换的模块组成,它们可以根据任务和环境需求,自主地重组、生长、修复甚至繁殖。
未来研究将聚焦于以下几个方向:
🔸微型化和规模化:目前的Truss Link长度28cm,单个质量280g。如果能把模块缩小到毫米甚至微米级别,就有可能构建由数百万个单元组成的真正“可编程物质”。
🔸自主控制与感知:目前的实验依赖人工遥控。未来的模块需要集成IMU、电流传感器、摄像头等,并运行分布式控制算法,使集群能够自主决定何时生长、如何生长。
🔸高性能仿真平台:目前PyBullet仿真不足以支持强化学习训练。需要开发并行度高、保真度好的仿真环境,用于学习拓扑识别、运动控制和转变策略。
🔸能量与信息共享:当前模块各自带电池,且没有跨模块通信。如果能在连接点实现无线充电和数据交换,可以大幅提高系统整体的能量利用效率和协调能力。
🔸自复制能力:既然可以消耗模块来生长,理论上,如果环境中模块充足,一个机器人群体应该能够复制出另一个完整的群体。这是机器人生态系统的终极考验之一。
当机器不再只是被制造出来,而是能够像生物一样“长大”,我们离真正的自主机器人还有多远?欢迎在评论区分享你的看法。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。