英文题目:An Automatic Cutting Plane Planning Method Based on Multi-Objective Optimization for Robot-Assisted Laminectomy Surgery
中文题目: 基于多目标优化的机器人辅助椎板切除手术自动切割平面规划方法
作者:Gaodeng Liu, Xiaozhi Qi, Meng Li, Yongsheng Gao, Ying Hu, Lei Hu, Yu Zhao
作者单位: 中国科学院深圳先进技术研究院、中国科学院大学、哈尔滨工业大学、北京航空航天大学、北京协和医院
期刊:IEEE Robotics and Automation Letters(IF 5.3 新锐二区Top,JCR Q1)
发表时间:2025年1月14日
链接:https://ieeexplore.ieee.org/document/10840255
引文格式:Liu G, Qi X, Li M, et al. An automatic cutting plane planning method based on multi-objective optimization for robot-assisted laminectomy surgery[J]. IEEE Robotics and Automation Letters, 2025, 10(3): 2343-2350.
01 全文速览
腰椎椎板切除术是治疗腰椎管狭窄的常用术式,需要精准切除部分椎板以解除神经压迫。但脊柱结构复杂,手术路径规划高度依赖医生经验。机器人辅助手术虽有潜力,但“在哪里下刀”这一核心问题,至今没有成熟的自动化方案。
中科院深圳先进院联合多家单位提出了一种基于多目标优化的自动切割平面规划方法。他们不依赖大量标注数据,而是从CT图像中自动提取椎板的几何特征,将切割路径规划转化为一个在可行域内搜索最优切割平面的优化问题。
图1 展示了整体技术路线:从CT图像中识别椎板区域,建立局部坐标系生成候选切割平面,然后基于三个目标函数(平均厚度、入口点导数、关节突重叠度)进行加权优化,最终输出最优切割平面。
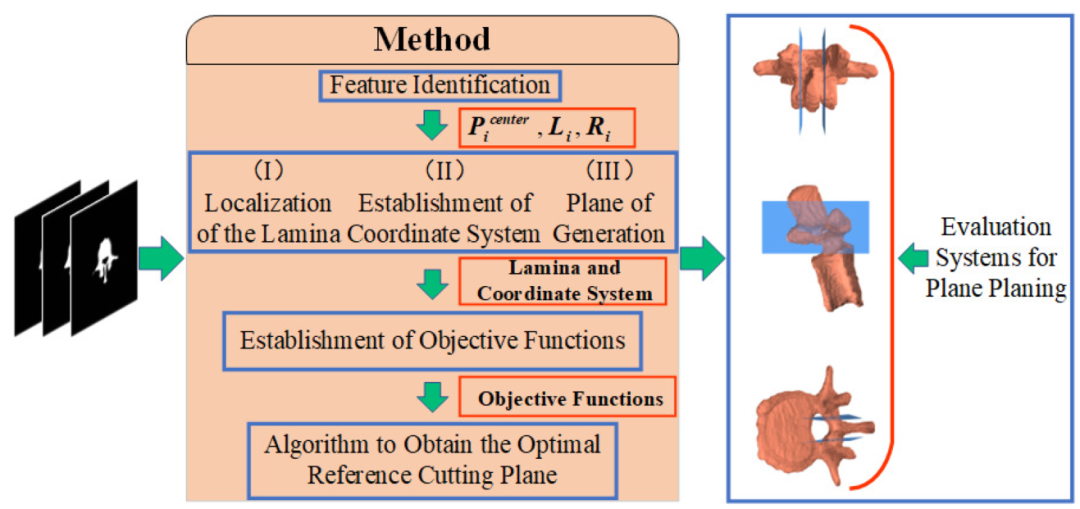
图 1 本文方法总体流程图
他们用公开的VerSe数据集(20套腰椎CT)生成了480条规划路径,在单椎体、两椎体、三椎体三种场景下测试。实验结果显示,优良率达到94.38%,平均单侧规划时间仅3.13秒,显著优于半自动方法的72.17秒。
核心亮点:
✅ 不依赖大量训练数据:纯几何方法,无需标注数千例CT
✅ 三项目标函数精准对应临床需求:厚度、平滑度、邻椎重叠
✅ 算法可解释性强:每个优化项都有明确的解剖学含义
✅ 效率极高:3秒完成单侧规划,满足术中实时需求
✅ 公开数据集验证:VerSe 20例腰椎CT,480条路径全覆盖
02 研究内容🔍 2.1 预处理:从CT中找到“椎板在哪”
算法的第一步是从CT图像中定位椎板区域。作者利用了一个关键的解剖学关系:椎板与椎管在几何上高度相关。通过找到椎管的最大内切圆和最小外接圆,可以确定椎管中心点、左右椎弓根内侧缘点,进而框定出椎板的大致范围。
图2 展示了这一过程:椎管中心点、左右椎弓根内侧缘点,以及由此确定的椎板区域。
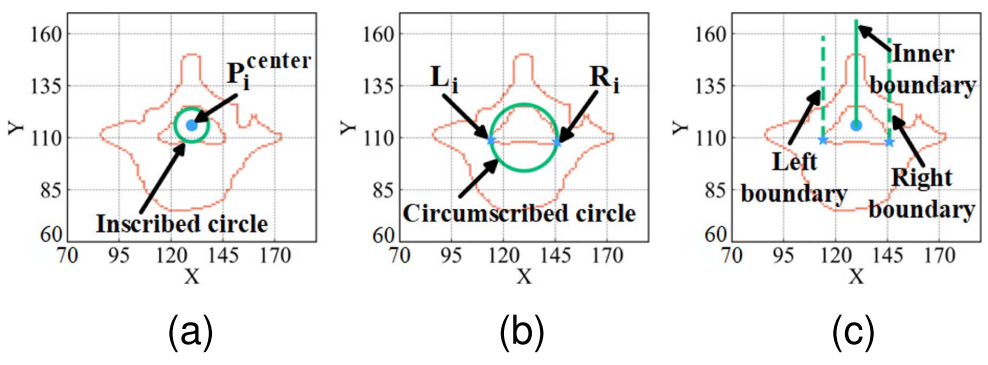
图 2 椎管特征点与椎板区域识别
有了这些特征点,接下来建立局部坐标系。图3 展示了局部坐标系的生成过程:通过椎管中心点拟合直线、通过左右椎弓根内侧缘点拟合平面,再通过投影和交线确定矢状面和冠状面。
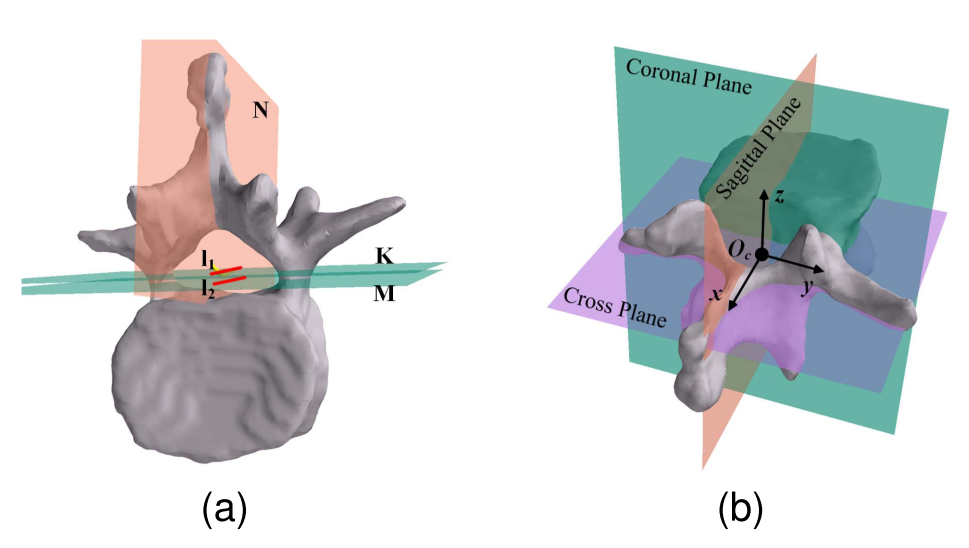
图 3 局部坐标系建立过程
图4 展示了坐标系的旋转变换,将局部坐标系统一到全局观察方向。
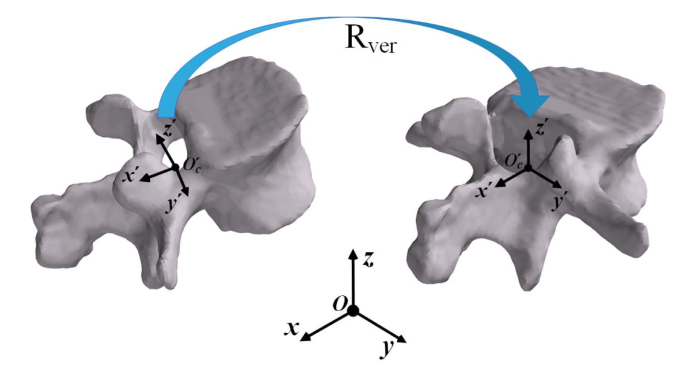
图 4 椎体坐标系旋转变换
🎯 2.2 三项目标函数:临床需求的形式化
有了局部坐标系和候选切割平面,接下来定义优化目标。作者提出了三个目标函数,每个都对应明确的临床考量。
① 平均厚度
椎板的厚度直接关系到切割的安全裕度。但椎板形状不规则,直接测量困难。作者用一个巧妙的近似:切割轮廓的面积除以z轴方向的最大距离。
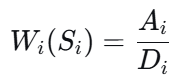
其中A_i是切割轮廓的面积, D_i是轮廓在z轴方向的最大跨度。目标函数Z_1(S_i)是该厚度与所有候选轮廓平均厚度的比值,越小越好。
图5直观展示了这个计算:橙色区域为切割轮廓面积,蓝色线为z轴最大距离,红色线为估算的平均厚度。
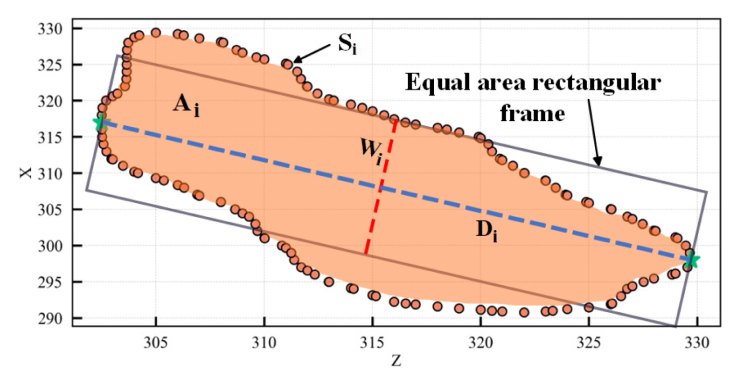
图 5 椎板平均厚度估算示意
② 入口点导数
手术器械的切入点应该选在椎板表面相对平坦的位置,避免在陡坡处“打滑”或引起振动。作者用一阶导数来量化平坦度,同时考虑y轴和z轴两个方向。
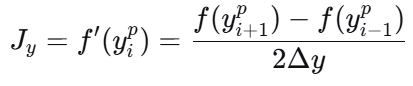
目标函数Z_2(S_i)是两个方向导数绝对值之和,越小越平坦。
图6展示了入口点导数的计算:不同颜色的轮廓代表不同切割平面,每个轮廓内的切入点P_i处的切平面斜率通过相邻点差分获得。

图 6 切割路径入口点导数计算示意
③ 关节突重叠度
这是多椎体规划时特有的问题。如果相邻椎体的切割平面选得不好,上下关节突可能相互重叠,导致手术时需要额外切除。作者用相邻椎体切割轮廓的重叠面积来量化这个风险。

当该值为正时表示存在重叠,值越大重叠越严重。目标函数Z_3(S_i)直接取这个重叠值,越小越好。
图7展示了相邻椎体切割轮廓的重叠区域(蓝色部分),通过左右轮廓的边界点坐标差计算重叠面积。
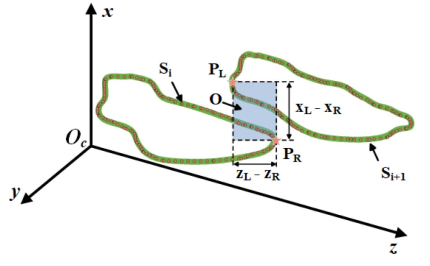
图 7 相邻椎体关节突重叠度计算
⚖️ 2.3 优化求解:加权求和与算法流程
三个目标函数通过线性加权求和整合为单一优化目标:

权重的设定基于临床经验:单椎体时



算法1 给出了完整的规划流程。核心逻辑如下:
1. 初始化:对每个椎体,初始化厚度集和导数集
2. 生成候选平面:在内外边界之间以1像素步长生成所有可能的切割平面
3. 计算厚度和导数:对每个候选平面,计算其切割轮廓的厚度和入口点导数
4. 单椎体最优:如果是第一个椎体或单椎体规划,直接取最优平面
5. 多椎体最优:如果是多椎体,额外计算相邻椎体的关节突重叠度,综合前后椎体的最优信息,重新计算最优平面
6. 输出:返回最优切割平面和切割路径
📊 2.4 实验验证:480条路径,94%优良率
他们在VerSe数据集的20套腰椎CT上生成了480条规划路径,涵盖单椎体(200条)、两椎体(160条)、三椎体(120条)。表1 和 表2 汇总了主要结果。
表1 对比了本文方法与半自动方法[13]在不同椎体数量下的优良率。本文方法在单椎体、两椎体、三椎体上的优良率分别为85.50%、80.63%、77.50%,均显著优于半自动方法。
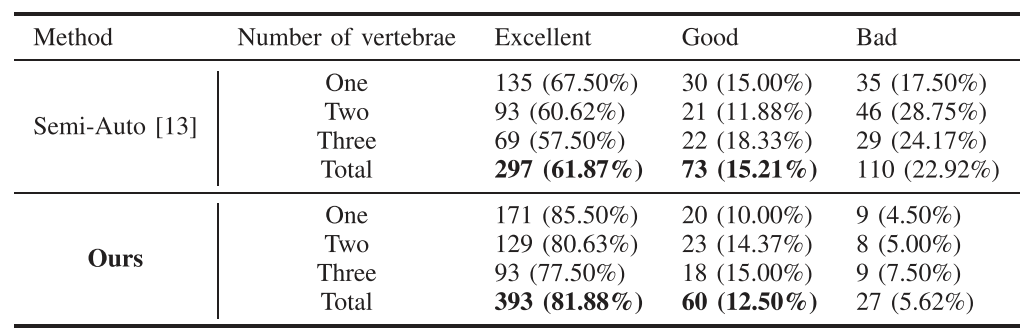
图 8 本文方法与半自动方法的优良率对比
图 9对比了整体优良率和规划时间。本文方法优良率为94.38%(453/480),半自动方法仅77.08%(370/480)。中位规划时间从72.17秒缩短到3.13秒,p值小于0.001,差异具有统计学意义。
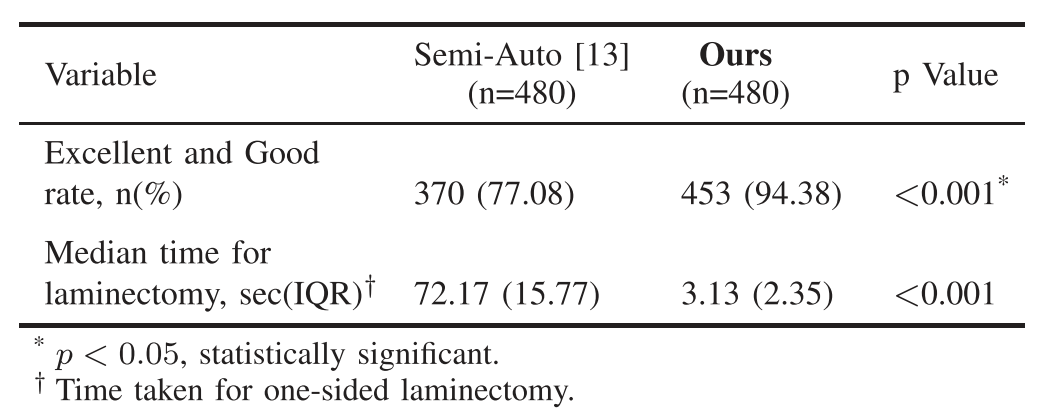
图 9 本文方法与半自动方法的效率和精度对比
图9 展示了评价区域的划分标准:A1区为外侧三分之一、A2为中间三分之一、A3为内侧三分之一、A4为椎弓根内侧缘外侧区域(对应论文 Fig. 9)。
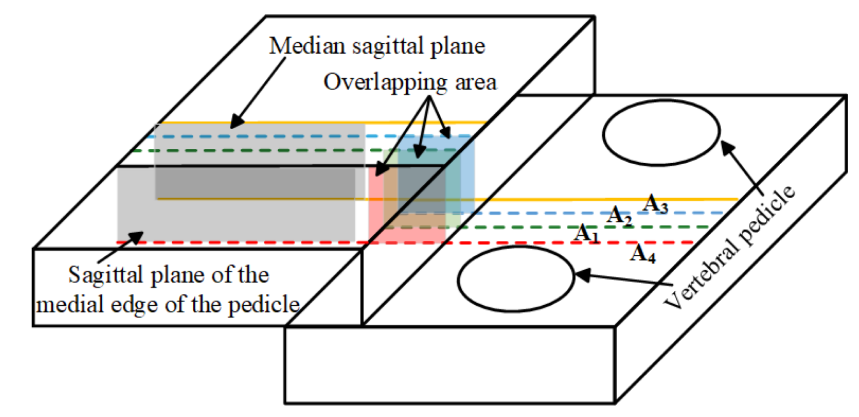
图 10 切割平面效果评价区域划分
图10 展示了单椎体和多椎体的规划效果:a-c为单椎体在冠状面、矢状面、横断面的效果;d-g为多椎体的冠状面和矢状面效果。
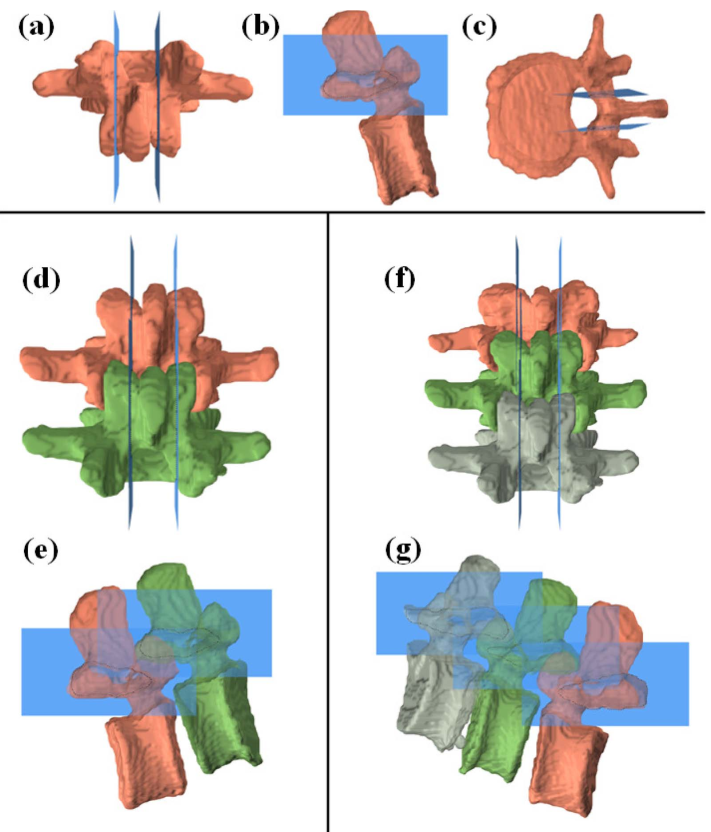
图 11 单椎体与多椎体切割平面规划效果
03 创新点①用多目标优化重新定义椎板切割规划
此前的工作要么是半自动(需要医生手动选区域),要么是纯数据驱动(需要大量标注)。本文用三项几何目标函数将临床需求形式化,不依赖训练数据,结果可解释,便于医生理解和信任。
②关节突重叠度:多椎体规划的关键约束
现有方法往往逐椎体独立规划,忽略了相邻椎体关节突的相互影响。本文提出的重叠度目标函数,第一次在多椎体椎板切除规划中显式考虑邻椎关系,避免了术中因重叠而额外切除的麻烦。
③三项目标函数各有解剖学依据
平均厚度 → 切割安全裕度
入口点导数 → 器械稳定性
关节突重叠 → 邻椎协调性
每个目标都能在解剖图谱中找到对应,不是黑箱,是白盒。
④公开数据集+统计检验
使用VerSe公开数据集(MICCAI 2019/2020挑战赛数据),结果可复现。采用Mann-Whitney U检验和卡方检验,p<0.05判定为统计显著,结论可靠。
⑤3秒规划,远超半自动方法的72秒
规划效率提升超过20倍。对于术中需要实时调整的场景,这个时间差可能意味着手术时间缩短半小时。
04 总结与展望这篇工作给人的整体印象是:扎实、克制、可落地。
没有堆砌复杂的深度学习模型,而是用经典的多目标优化框架解决了实际问题。三项目标函数的选择都有明确的解剖学依据,权重设置来自临床经验,整个流程对医生来说是“透明”的——这一点在医疗AI领域尤其重要。
实验设计也很完整:20例CT、480条路径、三种椎体数量、与半自动方法对比、统计检验。数据量不算大,但胜在干净、可复现。
当然,方法也有局限性。目前只考虑了三项目标函数,精度略低于深度学习方法。此外,L5节段靠近骶骨,有时会融合,影响了部分规划的准确性。
未来研究将聚焦于以下几个方向:
🔸纳入更多目标函数:如椎板曲率、邻近血管神经分布、骨密度等,进一步提升规划的精细度
🔸加入人工交互接口:允许医生在算法输出基础上进行手动微调,形成“人机协同”的规划模式
🔸扩展到全脊柱:目前聚焦腰椎,未来可推广到颈椎、胸椎,覆盖更广泛的脊柱手术
🔸与术中导航实时联动:将术前规划与术中实时影像配准,实现动态调整
🔸多中心临床验证:在更多医院、更多病例上验证方法的泛化能力
从结果看,这个方法已经具备了临床应用的基础。下一步要做的,是把它从“论文里的方法”变成“手术室里的工具”。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。