英文题目:A
springtail-inspired multimodal walking-jumping microrobot
中文题目:受弹尾虫启发的多模态行走-跳跃微型机器人
作者:Francisco
Ramirez Serrano; Nak-seung Patrick Hyun; Emma Steinhardt;
Pierre-Louis Lechère; Robert J. Wood(通讯)
作者单位:Harvard
Microrobotics Laboratory, Harvard University, Cambridge, MA, USA
期刊:Science Robotics(IF
25.7 中科院一区,JCR一区)
发表时间:26 February 2025
链接:https://doi.org/10.1126/scirobotics.adp7854
引文格式:Ramirez
Serrano F, Hyun N-s P, Steinhardt E, et al. A springtail-inspired
multimodal walking-jumping microrobot[J]. Science Robotics, 2025, 10:
eadp7854.
当机器人变得越来越小,地面上的一块小石子都成了难以逾越的“高山”。如何让厘米级别的微型机器人在复杂地形中自由穿梭?哈佛大学的研究团队从自然界的小小跳虫身上找到了答案。
本研究成功开发了一款重量仅2.2克、长度6.1厘米的行走-跳跃多模态微型机器人。该机器人不仅能够像昆虫一样灵活行走,还能通过仿生弹跳机制实现高达1.4米(23倍体长)的跳跃距离,性能超越同体型的昆虫。研究团队通过高速摄像揭示了仅14毫秒的起跳过程,发现其动力学特性与跳虫惊人地相似。
核心亮点:
✅ 极致轻量:2.2克重量,比一枚硬币还轻
✅ 超强跳跃:1.4米距离,相当于人类跳过40层高楼
✅ 精准控制:可重复定向跳跃,落地后保持直立
✅ 多模运动:行走、跳跃无缝切换,跨越多种复杂地形
02 研究内容🦗 灵感来源:跳虫的秘密武器
跳虫是一种微小的六足动物,它们拥有一个独特的跳跃器官——furcula(叉状弹器)。这个特殊的附肢平时收在腹部下方,当遇到威胁时,它会猛地撞击地面,瞬间将身体弹射到空中躲避危险。
研究团队发现,跳虫的跳跃过程可以分为六个阶段,从锁定、触地、旋转到离地,整个过程仅需14毫秒,时间不对称性高达500倍以上!
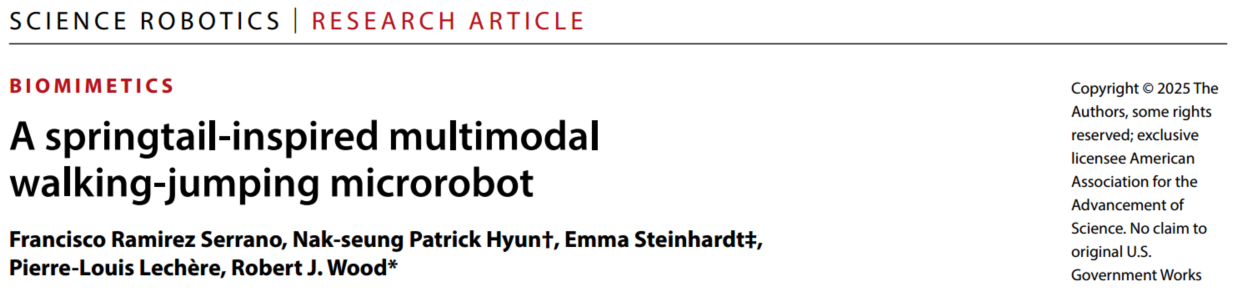
图
1.
机器人和弹尾并排跳跃序列,分为六个阶段。
(A) 以每秒
1450 帧
(fps)
的速度捕获的
Tomocerus
vulgaris 跳跃序列,由
E.
Christian (5) 提供。
(B) 电影
S1
中观察到的机器人跳跃序列。视频使用
Phantom
高速摄像机以
28,546.3
fps 的速度录制。对于每个跳跃阶段,起始帧和结束帧是重叠的。
(C)
具有标记转换的关键事件的时间顺序。该序列突出了加载阶段
I
之间较大的时间不对称性;跳跃阶段
II、III、IV
和
V;和空中第六阶段。
(D)
(i)剪下的
1
毫米长的球状跳虫(暂定为
Dicyrtomina
ornata)。
(ii)
弹尾腹侧图。被称为分叉的引人注目的附属物隐藏在下方,由巢穴
(d.) 和柄
(m.)组成。
图中展示了机器人与跳虫的跳跃序列对比,两者惊人的相似性揭示了这一设计的生物合理性。
🤖 技术创新:仿生跳跃机构
研究团队设计了一套精巧的扭矩反转弹射机构,灵感来自螳螂虾的捕食机制。该机构包含:
形状记忆合金(SMA)驱动器:通过电流加热收缩,缓慢储存能量
五杆连杆机构:通过几何奇点实现能量快速释放
分段式被动跳跃附肢:包括“胫节”和“足”,模仿跳虫的叉状弹器
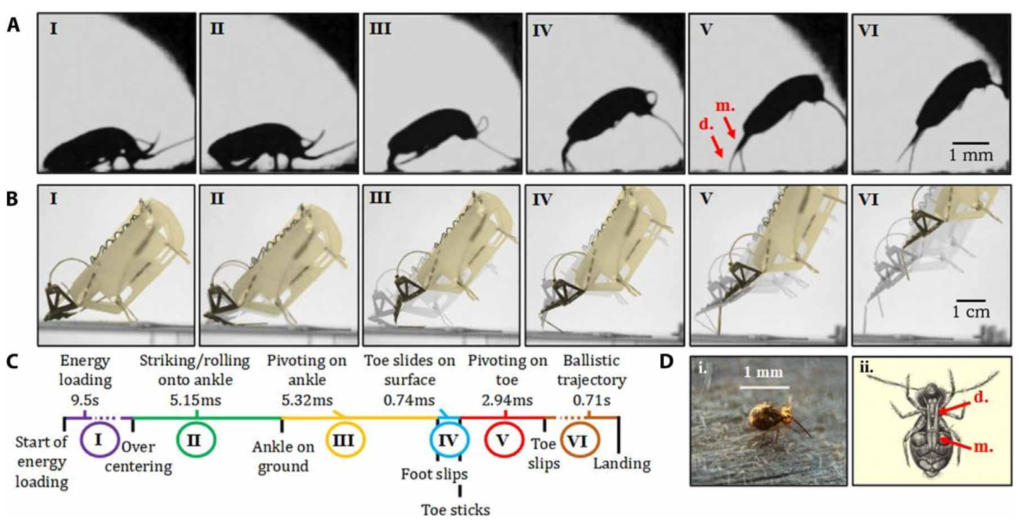
图
2.
跳跃机构模型,显示闭锁机构和物理原型以及组件分解。
(A)
处于锁定状态的机器人模型。当肌腱力
Ft
拉向膝关节下方时,胫骨上随之而来的扭矩
τti
使其保持抵靠股骨的折叠状态。
(B)
当连杆移动并且肌腱力拉到膝关节上方时,胫骨处的扭矩翻转符号,触发跳跃。
(C)
跳跃机构位于电池供电的平台上,该平台加热
SMA
肌腱,导致收缩。
(D)
跳跃机器人原型在起飞过程中的剖面图。
(E)
基础原型由六个元素组成。
图中展示了跳跃机构的工作原理,当肌腱力拉动超过膝关节时,扭矩方向反转,触发快速释放。
📊 性能测试:超越生物极限
经过优化设计,这款微型机器人实现了令人惊叹的性能:
参数 数值 对比
质量 2.2
g 比一张A4纸还轻
长度 6.1
cm 约一节手指长度
最大跳跃距离 1.4
m 23倍体长
起跳速度 ~20
m/s 72 km/h
加速度 1,430
m/s² 146倍重力加速度
起跳时间 14.15
ms 人眼无法捕捉
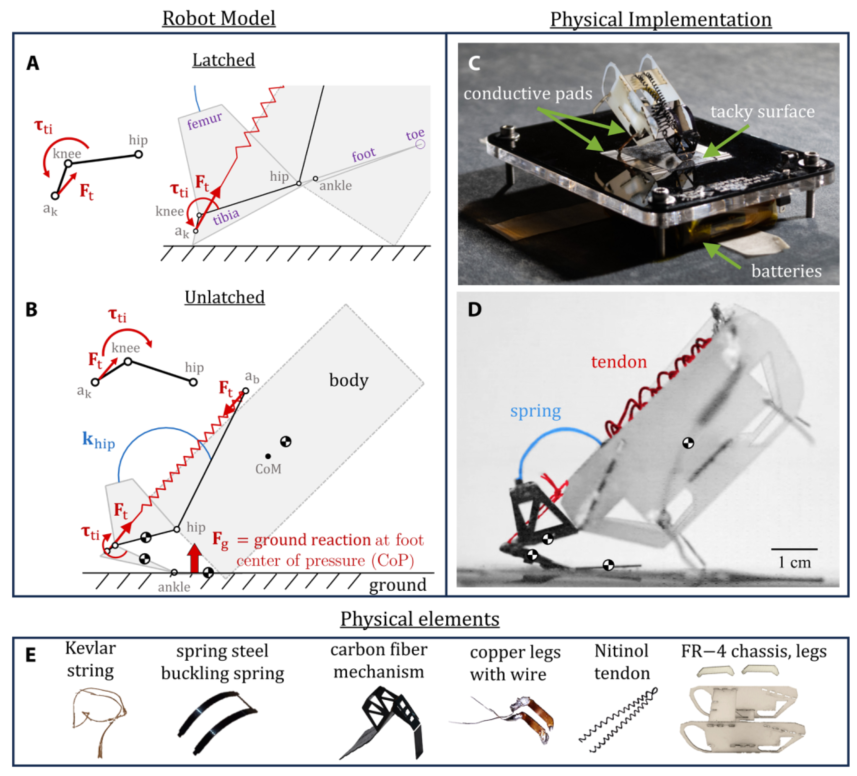
图3.
跳跃轨迹。
(A)
各种髋部弹簧能量值的预测最佳轨迹以黑色表示(起飞角为
59°)。红色轨迹表示运动捕捉设置中测量的原型跳跃轨迹。洋红色轨迹对应于
khip =
334 N·mm·rad−1 优化解的不同起飞角度(56°、64°
和
73°)。
(B)
该机构实现的
1.4
米跳跃距离峰值的帧重叠以展示轨迹。
图中展示了机器人跳跃的完整轨迹,最高点可达数十厘米,飞行距离超过1米。
🏃 多模态集成:HAMR+跳跃模块
研究团队将这套跳跃机构集成到已有的哈佛步行微型机器人(HAMR)平台上,打造出真正的多模态机器人。HAMR采用压电驱动器驱动四足行走,支持多种步态(行走、小跑、跳跃、弹跳等)。
为了成功集成,团队进行了多项创新设计:
高摩擦力的X8
Gel-Pak材料覆盖接触表面
弹性复位肌腱实现重复跳跃
着陆导向环帮助机器人自动回正
FR-4绝缘材料防止短路
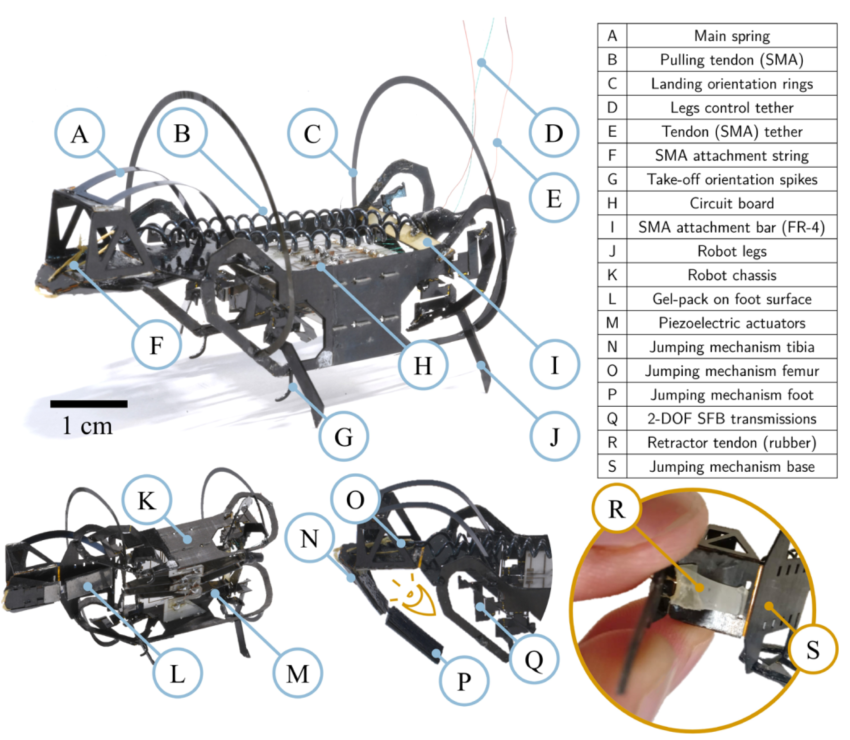
图4.HAMR与本文开发的LaMSA跳跃模块集成。
图中展示了完整的HAMR-Jumper机器人,所有组件精密集成在6厘米的机身内。
🌍 应用演示:征服复杂地形
研究团队设计了一系列挑战性场景,展示了这款机器人的卓越能力:
平台跳跃:机器人准确跳上3.5厘米高的平台(图5B)
跨越间隙:越过障碍物,降落在10°斜坡上(图5C)
障碍物跨越:跳过香蕉,从8°斜面跳到9°斜面(图5D)
物体操控:利用跳跃附肢推动较重物体(图5E)
障碍物敲击:触发物体移动(图5F)
物体抓取:在跳跃路径上拾取物品(图5G)
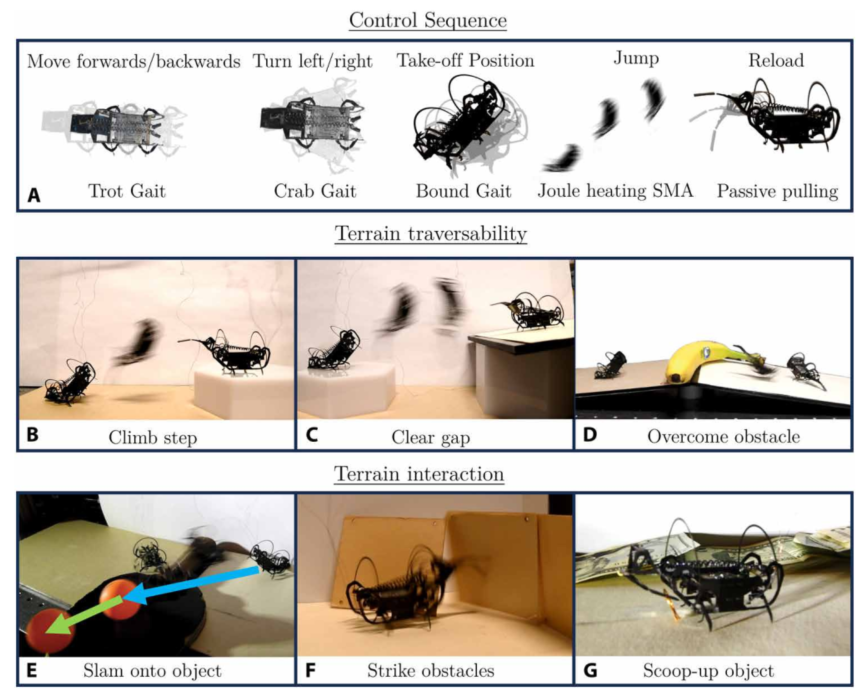
图
5.
机器人多模式运动能力和各种地形交互。
(A)
多模式运动是通过将不同的运动基元链接在一起来实现的。示例包括快步(向前/向后)、螃蟹步态(向左、向右,以及带有附加转动组件)和跳跃步态。此外,跳跃是通过使恒定电流流过
SMA
来控制的。当
SMA
冷却且延伸的肌腱反冲时,重新加载会被动发生。
(B 到
D)
地形导航演示,其中机器人分别跳到升高的平台上、在倾斜地形上清除间隙以及克服障碍。
(E 到
G)
跳跃机制实现的其他地形交互包括跳到物体上移动它们、机器人直立时撞击墙壁以及用缩回的尾巴舀起物体。
图中展示了机器人在不同地形和应用场景中的表现,充分体现了多模态运动的价值。
03创新点①仿生分段式跳跃附肢
首次在微型机器人中引入分段式被动跳跃附肢(胫节+足),完美模拟跳虫叉状弹器的运动学特性。这一设计不仅提高了跳跃稳定性,还能更有效地将能量转化为前进动力。
②扭矩反转弹射机制
采用螳螂虾启发的扭矩反转弹射机制,通过几何奇点实现能量快速释放。与传统设计相比,这一机制只需要一个驱动器就能同时完成能量储存和释放,极大减轻了重量和复杂度。
③动态建模与优化
建立了约束拉格朗日动力学模型,精确模拟跳跃过程中的地面接触力变化。通过500次迭代优化,找到了最优设计参数组合,实现了性能最大化。
④多模态运动集成
首次将高性能跳跃机构与敏捷四足步行平台成功集成,实现了真正的多模态运动。机器人可以在行走和跳跃模式间无缝切换,为复杂环境探索提供了新思路。
⑤生物学验证平台
这款机器人不仅是一项工程成就,还可作为研究跳虫跳跃行为的物理模型,验证了Brackenbury和Hunt关于叉状弹器关节作用的理论假设。
04 总结与展望本研究成功开发了一款受跳虫启发的行走-跳跃多模态微型机器人,重量仅2.2克,却能实现1.4米的跳跃距离(23倍体长),性能超越同体型的昆虫。通过精妙的扭矩反转弹射机构和分段式被动跳跃附肢,该机器人能够精准控制跳跃方向,在复杂地形中实现多种机动动作。
未来研究将聚焦于以下几个方向:
🔸 能量自主化:集成微型电池和控制电路,实现真正无缆运行,拓展应用场景。
🔸 跳跃轨迹实时调控:通过主动控制技术,实现跳跃过程中的轨迹修正,提高目标命中率。
🔸 多机器人协同:探索多个机器人协作完成复杂任务的可能性,如集群搜索与救援。
🔸 抗摔性能优化:深入研究不同着陆姿态对机器人的影响,提高重复使用的可靠性。
🔸 小型化改进:进一步减小尺寸,探索亚厘米级机器人的跳跃机制与动力学特性。
🔸 新材料应用:引入新型智能材料,提高能量密度和驱动效率,实现更高的跳跃性能。
这款受跳虫启发的微型机器人,不仅展示了仿生学在机器人设计中的巨大潜力,也为我们理解自然界微小生物的惊人能力提供了新的视角。未来,这类机器人有望在灾害搜救、环境监测、军事侦察等领域发挥重要作用。