在具身智能和人形机器人快速发展的今天,一个共识正在行业内形成:
机器人操作能力的上限,很大程度上取决于数据采集层的质量。
尤其是在灵巧操作(Dexterous Manipulation)领域,机器人不仅要“看见”世界,更要像人一样完成抓取、捏合、插拔、堆叠等高自由度动作。而这些能力的训练,离不开海量、高精度的人类演示数据。
问题在于——
真正高质量的手部数据,极难采集。
这也是为什么越来越多的机器人公司、研究机构与数据集项目,开始将 MANUS 数据手套视为机器人训练数据采集的核心基础设施。

从 Mimic Robotics、N1 Robotics 到 Seoul National University 与 RLWRLD 联合构建的 HRDexDB,大量行业案例正在证明:
MANUS 的价值,不只是“追踪手势”,而是提供一套稳定、可扩展、适用于真实世界机器人的数据采集能力。
为什么机器人训练最怕“脏数据”?
训练机器人操作策略,与训练传统AI模型完全不同。
在语言模型里,一些噪声数据尚可通过规模被平均分配;
但在机器人领域,一次错误抓取、一个手指偏移、一次姿态漂移,都可能直接变成机器人未来执行任务时的失败模式。

尤其在人手操作中,存在几个天然难题:
·手部自由度极高
·手指频繁遮挡
·抓取过程存在大量微动作
·操作动作持续时间长
·多操作者之间差异巨大
而传统基于视觉的手部追踪方案,很容易在以下情况下失效:
·自遮挡
·光照变化
·多角度抓取
·快速运动
·长时间采集
结果:
·数据不连续
·姿态抖动
·轨迹漂移
·关键抓取意图丢失
对于大模型训练而言,这些问题会直接降低策略泛化能力。
因此,行业越来越意识到:真正限制机器人能力的,不只是模型,而是数据源本身。
MANUS 为什么能成为行业标杆?
1. 无遮挡、无漂移的高精度追踪MANUS 手套最大的核心优势,在于:
·不依赖摄像头
·不受视线遮挡影响
·长时间运行无累计漂移
·可持续输出稳定手部运动学数据
其基于电磁场的追踪方案,可以对手部 25 个自由度进行毫米级实时追踪。

这意味着:
每一个关节变化、每一次捏合、每一次抓取意图,都能够被完整记录下来。
相比视觉方案最常见的“丢手”“跳点”“重定位”,MANUS 更像是为机器人训练而生的数据输入设备。
2. 长时间采集依然稳定在机器人训练中,一个经常被忽视的问题是:
数据采集往往不是几分钟,而是持续数周、数月甚至跨团队进行。
如果追踪系统存在漂移问题:
·不同操作员数据无法统一
·不同时间段数据无法对齐
·同一动作语义会发生偏差
而 MANUS 的“无漂移”能力,恰恰解决了这一问题。
Mimic Robotics 在构建灵巧操作数据集时,就特别强调:
每次演示都能从开始到结束生成一致的姿态数据。
这对于大规模训练来说至关重要。
因为只有稳定的数据层,才能支撑真正可泛化的操作模型。
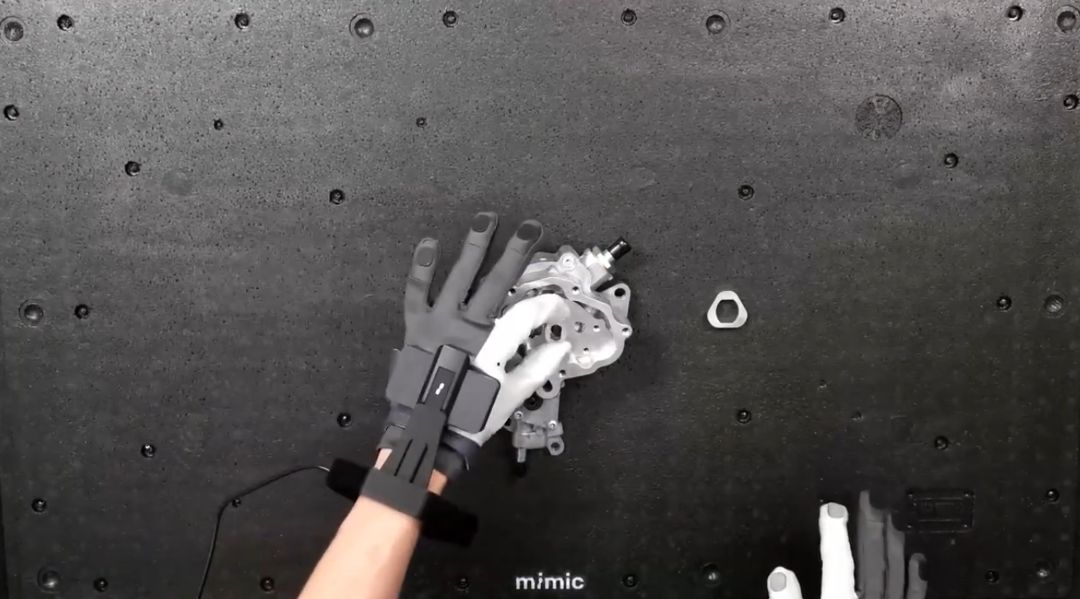
Mimic Robotics:把人类双手变成“移动数据源”
Mimic Robotics 将 MANUS 手套作为核心穿戴式输入设备,用于采集人类演示数据。
他们面临的核心问题是:
如何快速扩展机器人训练数据?
传统固定式动作捕捉系统存在明显瓶颈:
·部署复杂
·环境依赖强
·扩展成本高
·难以跨场景采集
而 MANUS 的穿戴式方案,直接改变了数据采集逻辑:
人本身,就是高保真的移动数据源。
操作员无需依赖复杂光学系统,就能在任意环境中稳定完成演示采集。
这让 Mimic Robotics 能够快速响应不同客户场景,并持续扩展数据集规模。
N1 Robotics:高保真输入决定高质量机器人行为
N1 Robotics 的案例,则进一步说明:
机器人远程操作系统的上限,取决于输入精度。
其开发的人形机器人远程操作平台 Waldo,需要把人类动作直接转换成机器人可学习的操作轨迹。

问题在于:
人手与机械手天然不同。
·尺寸不同
·关节结构不同
·自由度不同
·运动拓扑不同
因此,仅仅“捕捉动作”还不够。
真正困难的是:
如何保留人类抓取意图。
从“动作”到“机器人意图”为此,N1 Robotics 开发了 WaldoRT 重定向系统。
MANUS 手套负责:
·高精度采集
·捕捉手指协调关系
·保留捏合几何结构
而 WaldoRT 则负责:
·将人手动作映射到不同机械手
·自动适配不同机器人末端执行器
·保持抓取拓扑一致
最终实现:
同一个自然人类抓握动作,可以被稳定迁移到不同机器人平台。
这一点意义巨大。
因为对于机器人训练来说:
数据一致性,比单次动作炫酷更重要。
为什么 Waldo 比 Meta Quest 更适合机器人训练?
N1 Robotics 曾进行过一组非常典型的实验:
对比:
·基于 MANUS 的 Waldo
·基于 Meta Quest 的远程操作方案
测试任务包括:
·形状插入
·抓取吐司
·杯子堆叠
结果显示:
Waldo 在所有任务中都表现出:
·更高成功率
·更短完成时间
·更多有效尝试次数
尤其在形状插入任务中:
·Meta Quest 成功率仅 18.2%
·Waldo 成功率达到 93.3%
差距的本质,其实并不是“视觉解决方案不够先进”,而是:
机器人训练需要的是结构化、高保真、稳定的操作数据。
HRDexDB:MANUS 正在成为研究级数据基础设施
除了商业机器人公司,学术界也在大量采用 MANUS。
由 Seoul National University 与 RLWRLD 联合构建的 HRDexDB,就是当前极具代表性的灵巧操作数据集。
它包含:
·100 个物体
·1400 个抓取动作
·人类与机器人同步演示
·RGBD 数据
·触觉信息
·6D 物体姿态
·失败抓取样本
其中,MANUS 手套是整套远程操作系统的关键输入层。

研究团队使用 MANUS + Xsens 动捕服,将人类动作稳定映射到机器人平台。
更关键的是:
HRDexDB 采用的是“人机配对采集”。
即:
1. 先记录人类抓取
2. 再由机器人复现同一动作
3. 保持语义一致
4. 保留各自运动特征
这意味着:
如果手部追踪不稳定,整个跨具身数据体系都会失效。
因此在这种研究级场景中,MANUS 不再只是“硬件设备”,而是:
灵巧机器人研究的数据基础设施。
机器人行业正在重新定义“输入设备”
过去,人们认为:
机器人训练的核心是模型。
现在行业逐渐发现,真正决定上限的,其实是:
·数据质量
·数据一致性
·数据规模
·数据结构化能力
而这些问题,恰恰发生在“采集层”。
MANUS 的价值,本质上就在于:
它把人类最复杂、最难稳定捕捉的双手动作,转化成了:可结构化、可规模化、可泛化、可跨平台迁移的机器人训练数据。
这也再次印证了为什么越来越多机器人公司开始把 MANUS 视为具身智能时代的数据入口。
当行业进入大规模机器人训练阶段后,谁能持续稳定地产生高质量操作数据,谁就更有可能建立真正领先的机器人能力。





![话说这张让宇树机器人去合闸,而现场工程师躲得远远的照片火了🔥[捂脸哭][捂脸哭][](http://image.uczzd.cn/11389674828971202078.jpg?id=0)
