英文题目: Machine learning-driven innovation design of clustered tensegrity continuum robot
中文题目: 机器学习驱动的集束张拉整体连续体机器人创新设计
作者: Xincui Shi, Qi Yang, Kaiwen Hu, Binbin Lian, Yimin Song, Rongjie Kang, Tao Sun
作者单位: 天津大学(机构理论与装备设计教育部重点实验室)
期刊: Mechanism and Machine Theory(IF 5.2 中科院一区,JCR Q1)
发表时间: 2025年10月
链接: https://doi.org/10.1016/j.mechmachtheory.2025.106155
引文格式: Shi X, Yang Q, Hu K, et al. Machine learning-driven innovation design of clustered tensegrity continuum robot[J]. Mechanism and Machine Theory, 2025, 215: 106155.
01 全文速览
连续体机器人凭借其灵活性和环境适应性,在探索、救援、医疗手术等领域应用广泛。但现有缆驱连续体机器人存在两个硬伤:一是无法同时实现伸缩和弯曲运动,工作空间受限;二是冗余自由度导致逆运动学求解极其困难。
天津大学团队提出了一种机器学习驱动的创新设计方法,将张拉整体结构引入连续体机器人设计。张拉整体结构由受压杆件和受拉缆索组成,具有优越的变形能力和高载荷-重量比。图1展示了两种集束张拉整体结构(Class k):k=1时杆件不直接接触,通过拉索连接;k=2时杆件通过运动副连接,同时引入拉索满足自平衡要求。
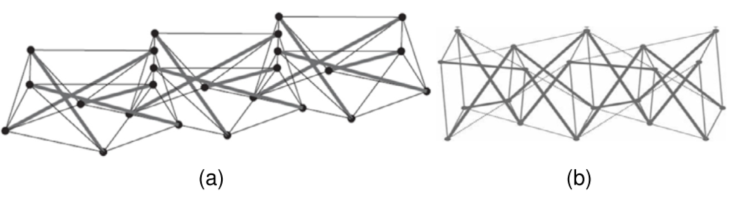
图 1 集束张拉整体结构分类
整个设计流程分为两步:拓扑设计和驱动律设计。拓扑设计用遗传算法(GA)搜索满足张拉整体特性(预应力模态数s>0、位移模态数m≥0)且具备三自由度运动能力的构型;驱动律设计用PPO算法学习避障和点到点运动。图2展示了完整的ML驱动设计流程:GA生成图结构→映射为机器人→DRL评估适应度→选择、交叉、变异→迭代进化。
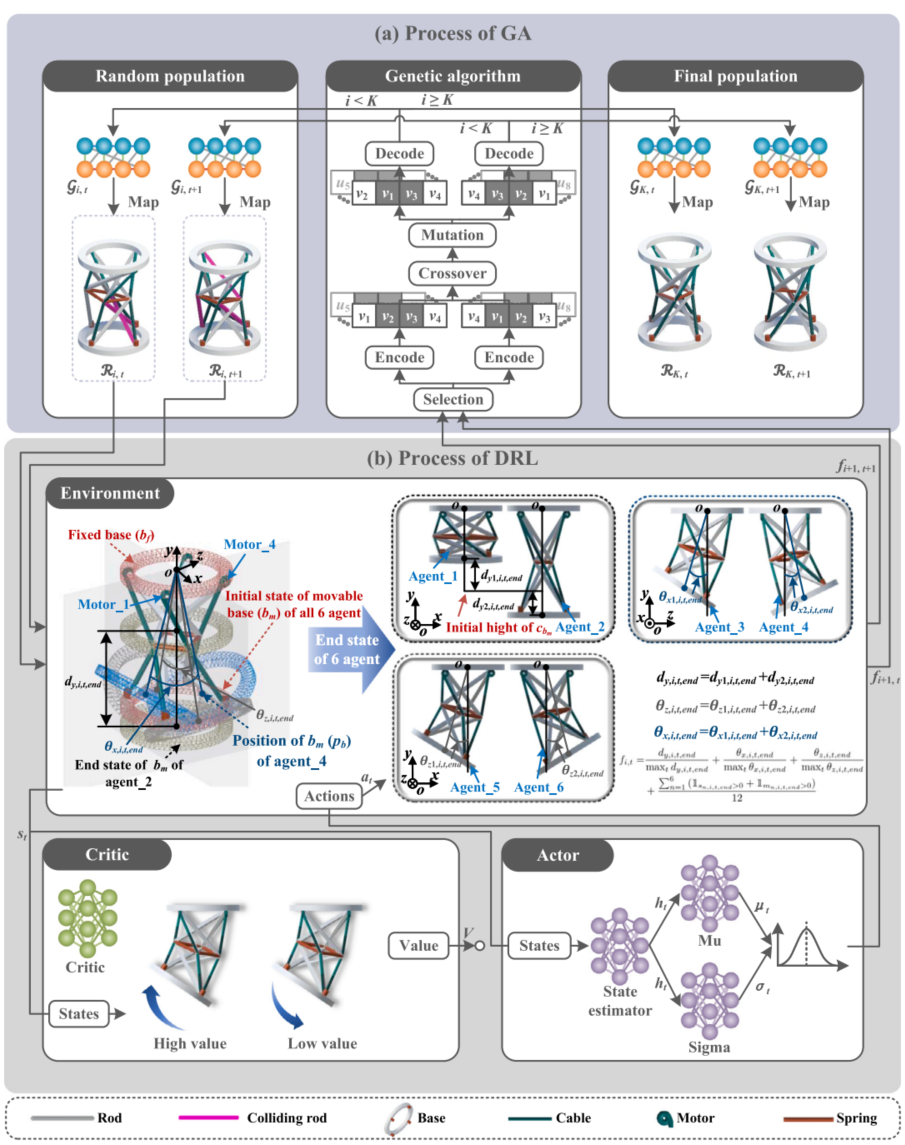
图 2 机器学习驱动的CTCR设计流程
最终获得了8种满足要求的CTCR构型,并成功学习了在25种不同障碍物位置下的避障运动策略。图3展示了四种典型避障案例的运动序列。
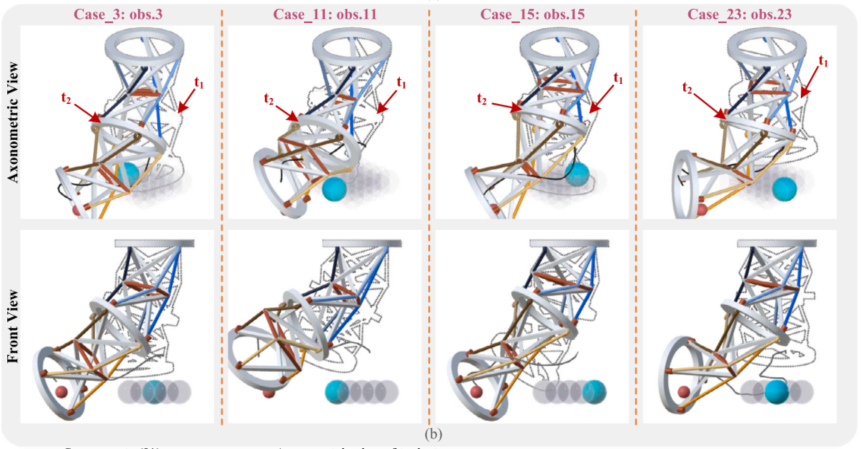
图 3 四种典型避障案例的运动序列
核心亮点:
✅ 图表达张拉整体结构:用图数据结构的顶点和边映射杆件和连接关系,为GA提供可操作的编码基础
✅ GA+DRL双驱动设计:GA搜索拓扑空间,DRL评估3-DOF运动能力,两者协同进化
✅ 绕过复杂建模:用增量模型替代传统运动学/动力学建模,用RL直接学习缆长到末端位姿的映射
✅ 避障运动规划:在25种不同障碍物配置下学习避障策略,成功率与障碍物位置强相关
✅ 可制造性设计:给出了详细的制造方案(铝杆、碳纤维板、M2006电机、钢丝缆绳等)
02 研究内容
🧬 2.1 图表达:把机器人结构翻译成图数据
CTCR由刚性元件(杆件和基座)和连接元件(电机、缆绳、弹簧、球铰)组成。作者用图数据结构来映射机器人:顶点(ν)表示刚性元件,边(ε)表示连接关系。
图4以4杆2单元CTCR为例,展示了完整的图表达。顶点用不同颜色区分:绿色为三角形基座、蓝色为四边形基座、灰色为五边形基座、橙色为六边形基座、红色为杆件。边用不同颜色箭头表示:绿色为球铰连接、蓝色为弹簧连接、灰色为电机+集束缆连接、橙色为集束缆+集束缆连接、红色为集束缆+锚定缆连接。
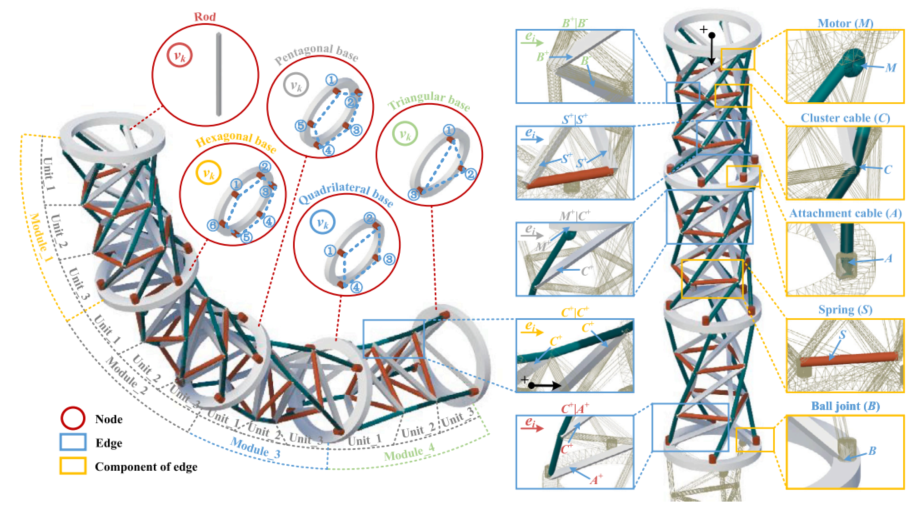
图 4 4杆2单元CTCR的图表达
顶点集 ν = {ν₀, ν₁, …, νₙ},边集 ε = {⟨μ₀, ν₁, ε₀⟩, …, ⟨μ_m, ν_n, ε_k⟩}。每个边的表达式如 `B⁺|B⁻` 表示球铰连接:`B⁺` 表示连接到上方杆件的下端,`B⁻` 表示连接到下方杆件的上端。这种表达方式为GA的编码、交叉、变异操作奠定了基础。
🧬 2.2 遗传算法:搜索满足要求的拓扑构型
CTCR的设计目标有三个:
1. 能轴向伸缩,也能前后和侧向弯曲
2. 运动过程中杆-杆、杆-缆无干涉
3. 缆绳始终保持张紧,满足张拉整体特性
图5展示了四边形基座CTCR的图结构及GA编码方式。图中的编号①~④对应基座上四个小圆柱的位置,边{v₁, v₂, v₃, v₄}的顺序决定了每条边连接到基座的哪个位置。
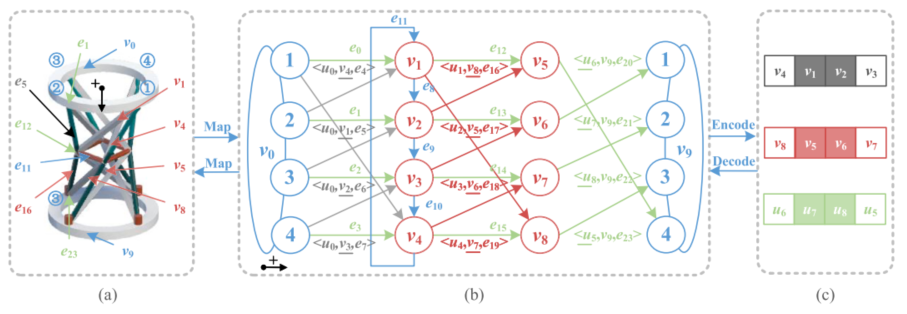
图 5 四边形CTCR的图结构与GA编码
图6展示了GA的详细流程。个体按适应度排序,精英保留,再通过交叉和变异生成下一代。交叉操作交换两个基因组中随机位置间的基因,变异操作交换两个随机基因的位置。
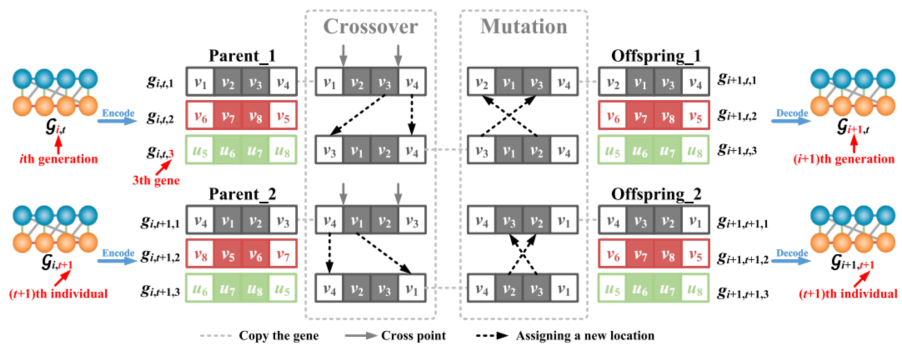
图 6 遗传算法详细流程
适应度函数综合了三个运动方向和张拉整体特性:

其中d_y为沿y轴移动距离,


图7展示了GA最终获得的8种满足要求的CTCR构型,包括三角形基座(Class 4)、四边形基座(Class 5)、五边形基座(Class 6)、六边形基座(Class 7)等不同类型。
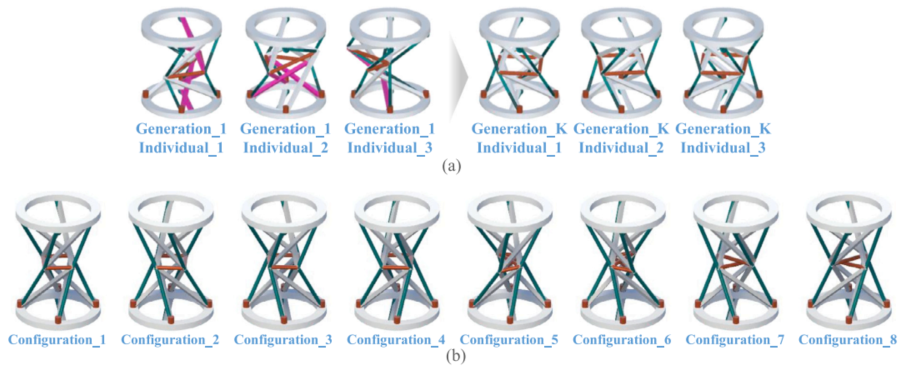
图 7 GA最终获得的8种CTCR构型
🧠 2.3 深度强化学习:学习3-DOF运动与避障规划
由于CTCR的逆运动学建模极其复杂,作者用PPO算法直接学习从状态到动作的映射。
3-DOF运动学习:6个智能体并行训练,分别对应沿y轴伸长(两个方向)、绕x轴弯曲(两个方向)、绕z轴弯曲(两个方向)。状态空间包含9个变量(移动基座位置、位移分量、角度分量),动作空间为4个电机转速。图8展示了6个智能体训练收敛后各项运动参数均为正值,说明所有构型都具备了3-DOF运动能力。
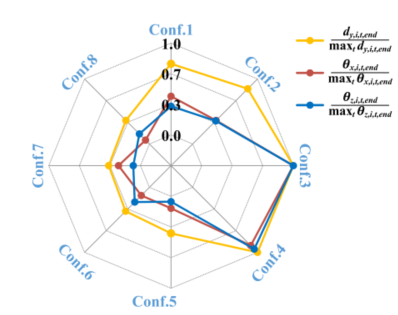
图 8 最终构型的3-DOF运动参数
避障运动规划:使用两模块CTCR,在25种不同障碍物位置下训练。状态空间包含17个变量(障碍物位置、两模块基座的位置和姿态、到目标点的距离),动作空间为8个电机转速。奖励函数设计了吸引区域和排斥区域:

图9分别展示了25种案例的成功率和末端位置误差。obs.11(障碍物紧贴目标点)成功率最低、误差最大,符合预期。
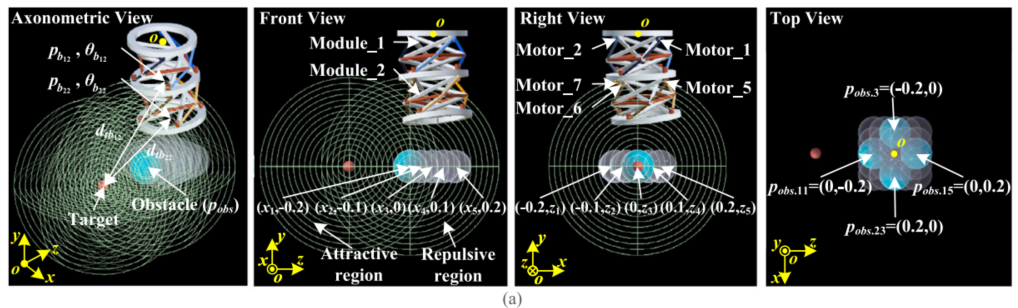
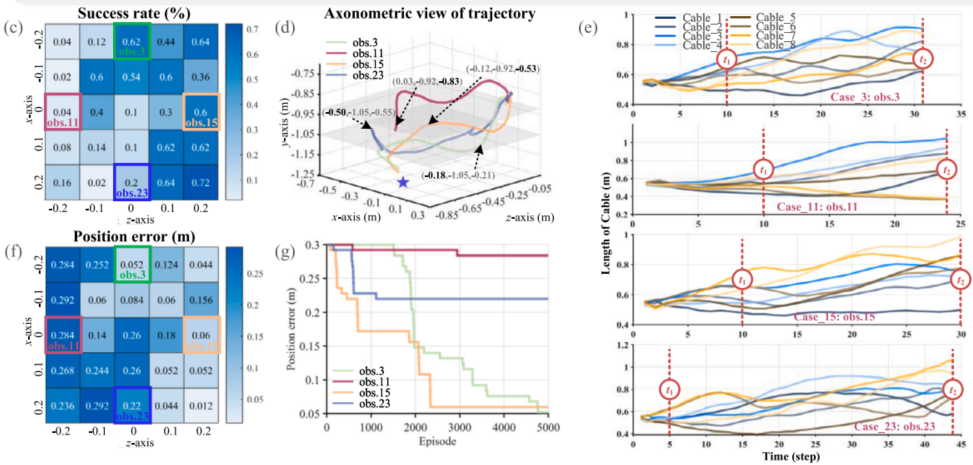
图 9 25种障碍物案例的成功率与位置误差
🔧 2.4 增量模型:绕过传统运动学建模
本文的一个关键技术亮点是增量模型。传统方法需要建立缆长变化与末端位姿之间的映射关系,这涉及复杂的刚-柔耦合和多参数问题。作者用增量模型替代:通过分析缆绳连接的两物体间的速度和角速度关系,用动量传递计算缆绳力。
核心思路:当缆绳两端的速度差沿缆绳方向的投影不为零时,会产生沿缆绳方向的冲量:
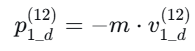
缆绳力通过累积冲量计算:
这个模型把复杂的运动学关系简化为两体问题,使仿真和RL训练成为可能。
03 创新点
①图表达+ GA实现CTCR拓扑自动生成
首次用图数据结构完整表达CTCR的拓扑结构(顶点=刚性元件,边=连接关系),并基于此设计GA的编码、交叉、变异操作。这为机器人拓扑的自动化设计提供了一个可扩展的框架。
②GA + DRL双驱动协同进化
GA的外循环搜索拓扑空间,DRL的内循环评估每种拓扑的3-DOF运动能力。两者共享同一个适应度函数,实现了“结构”和“控制”的协同设计,而非传统的串行设计。
③绕过复杂建模的增量模型
张拉整体结构的刚-柔耦合和多参数特性使精确建模极其困难。增量模型从动量传递角度计算缆绳力,避免了建立缆长-位姿映射的繁琐过程,显著降低了设计门槛。
④从拓扑设计到运动规划的完整闭环
不只是生成拓扑构型,还用DRL完成了避障运动规划,并验证了25种不同障碍物位置下的策略有效性。整个流程从“造出来”到“动起来”形成了闭环。
⑤可制造性设计
论文给出了详细的制造方案(铝杆加工、碳纤维板切割、M2006电机、STM32控制、钢丝缆绳、球铰等效替代等),为后续实物原型开发奠定了基础。
04 总结与展望
这篇工作最值得关注的地方不是某个单一的算法创新,而是设计范式的转变——用机器学习替代传统运动学/动力学建模,让“结构设计”和“控制设计”在同一个框架下协同进化。张拉整体结构本身具有优越的力学特性,但复杂的建模一直阻碍其工程应用。本文用图表达、GA、DRL和增量模型这套组合拳,绕过了这个障碍。
当然,目前的工作还有一些局限性:只验证了两模块CTCR,更多模块的扩展性有待探索;RL训练在仿真环境中完成,仿真到现实的迁移(Sim-to-Real)尚未验证;适应度函数中的权重需要人工设定,可能存在主观性。
未来研究将聚焦于以下几个方向:
🔸多模块扩展:探索三模块及以上CTCR的运动能力,以及模块间协同控制策略
🔸多智能体协同优化:将连接关系提取为独立智能体(Agent 2),与现有GA智能体(Agent 1)构成多智能体优化框架
🔸图神经网络引入:用GNN提取机器人拓扑的图卷积特征,实现端到端的拓扑性能预测
🔸仿真到现实迁移:在物理样机上验证所学策略,解决仿真与现实之间的动力学差异
🔸人工肌肉驱动:用人工肌肉替代传统电机,实现对弹簧和缆绳预紧力的实时主动控制,动态补偿制造和装配误差
在您的机器人设计实践中,是更倾向于用精确的数学模型驱动设计,还是用数据驱动的方法绕过建模?欢迎在评论区分享您的看法。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。

![人族和机器人第一次战争开启了[抠鼻]](http://image.uczzd.cn/15687064704896415685.jpg?id=0)